توجد الروبوتات الصناعية في جميع أنحاء الصناعة حيث يجب تلبية متطلبات الإنتاجية العالية. ومع ذلك ، يتطلب استخدام الروبوتات تصميم وتطبيق وتنفيذ ضوابط السلامة المناسبة لتجنب خلق مخاطر على موظفي الإنتاج والمبرمجين وأخصائيي الصيانة ومهندسي النظام.
لماذا تعتبر الروبوتات الصناعية خطرة؟
أحد تعريفات الروبوتات هو "نقل الآلات الأوتوماتيكية التي يمكن برمجتها بحرية وقادرة على العمل بواجهة بشرية قليلة أو معدومة". تُستخدم هذه الأنواع من الآلات حاليًا في مجموعة متنوعة من التطبيقات في جميع أنحاء الصناعة والطب ، بما في ذلك التدريب. يتم استخدام الروبوتات الصناعية بشكل متزايد للوظائف الرئيسية ، مثل استراتيجيات التصنيع الجديدة (CIM و JIT والإنتاج الخالي من الهدر وما إلى ذلك) في التركيبات المعقدة. ينتج عن عددهم واتساع تطبيقاتهم وتعقيد المعدات والتركيبات مخاطر مثل ما يلي:
- حركات وتسلسلات الحركات التي يكاد يكون من المستحيل متابعتها ، حيث غالبًا ما تتداخل حركات الروبوت عالية السرعة داخل دائرة نصف قطرها مع حركات الآلات والمعدات الأخرى
- إطلاق الطاقة الناتجة عن الأجزاء المتطايرة أو حزم الطاقة مثل تلك المنبعثة من الليزر أو النفاثات المائية
- إمكانية البرمجة المجانية من حيث الاتجاه والسرعة
- القابلية للتأثر بالأخطاء الخارجية (على سبيل المثال ، التوافق الكهرومغناطيسي)
- عوامل بشرية.
تشير التحقيقات في اليابان إلى أن أكثر من 50٪ من حوادث العمل مع الروبوتات يمكن أن تُعزى إلى أخطاء في الدوائر الإلكترونية لنظام التحكم. في نفس التحقيقات ، كان "الخطأ البشري" مسؤولاً عن أقل من 20٪. الاستنتاج المنطقي لهذه النتيجة هو أن المخاطر التي تسببها أخطاء النظام لا يمكن تجنبها من خلال التدابير السلوكية التي يتخذها البشر. لذلك يحتاج المصممون والمشغلون إلى توفير وتنفيذ تدابير السلامة التقنية (انظر الشكل 1).
الشكل 1. نظام تحكم تشغيل خاص لإعداد روبوت لحام متنقل

الحوادث وأنماط التشغيل
بدأت الحوادث المميتة التي تنطوي على الروبوتات الصناعية في الظهور في أوائل الثمانينيات. تشير الإحصاءات والتحقيقات إلى أن غالبية الحوادث والحوادث لا تحدث في التشغيل العادي (الإيفاء التلقائي للمهمة المعنية). عند العمل مع آلات وتركيبات الروبوتات الصناعية ، هناك تركيز على أوضاع التشغيل الخاصة مثل التشغيل أو الإعداد أو البرمجة أو التشغيل التجريبي أو الفحوصات أو استكشاف الأخطاء وإصلاحها أو الصيانة. في أوضاع التشغيل هذه ، يكون الأشخاص عادة في منطقة خطر. يجب أن يحمي مفهوم السلامة الأفراد من الأحداث السلبية في هذه الأنواع من المواقف.
متطلبات السلامة الدولية
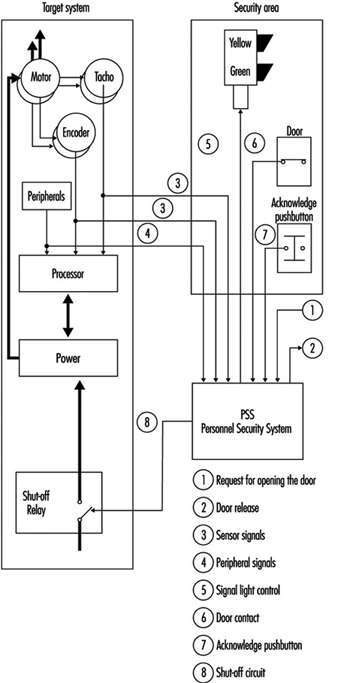
توجيه ماكينات EEC لعام 1989 (89/392 / EEC) (راجع مقالة "مبادئ الأمان لأدوات ماكينات CNC" في هذا الفصل وفي أي مكان آخر في هذا موسوعة)) يحدد متطلبات السلامة والصحة الرئيسية للآلات. تعتبر الآلة هي مجموع الأجزاء أو الأجهزة المترابطة ، والتي يمكن أن يتحرك جزء منها أو جهاز واحد على الأقل ويكون له وظيفة في المقابل. فيما يتعلق بالروبوتات الصناعية ، يجب ملاحظة أن النظام بأكمله ، وليس مجرد قطعة واحدة من المعدات على الجهاز ، يجب أن يفي بمتطلبات السلامة وأن يكون مزودًا بأجهزة السلامة المناسبة. يعد تحليل المخاطر وتقييم المخاطر طريقتين مناسبتين لتحديد ما إذا كانت هذه المتطلبات قد تم الوفاء بها (انظر الشكل 2).
الشكل 2. رسم تخطيطي لنظام أمن الأفراد
المتطلبات وإجراءات السلامة في التشغيل العادي
يفرض استخدام تكنولوجيا الروبوت الحد الأقصى من المطالب على تحليل المخاطر وتقييم المخاطر ومفاهيم السلامة. لهذا السبب ، يمكن أن تكون الأمثلة والاقتراحات التالية بمثابة إرشادات فقط:
1 - بالنظر إلى هدف السلامة المتمثل في ضرورة منع الوصول اليدوي أو المادي إلى المناطق الخطرة التي تنطوي على حركات تلقائية ، تشمل الحلول المقترحة ما يلي:
- منع الوصول اليدوي أو المادي إلى مناطق الخطر عن طريق الحواجز الميكانيكية.
- استخدم أجهزة أمان من النوع الذي يستجيب عند الاقتراب (حواجز الضوء ، حصائر الأمان) ، واحرص على إيقاف تشغيل الآلات بأمان عند الوصول إليها أو الدخول إليها.
- لا تسمح بالوصول اليدوي أو المادي إلا عندما يكون النظام بأكمله في حالة آمنة. على سبيل المثال ، يمكن تحقيق ذلك من خلال استخدام أجهزة متشابكة مع آليات إغلاق على أبواب الوصول.
2 - بالنظر إلى هدف السلامة المتمثل في عدم إصابة أي شخص نتيجة إطلاق الطاقة (الأجزاء المتطايرة أو حزم الطاقة) ، تشمل الحلول المقترحة ما يلي:
- يجب أن يمنع التصميم أي إطلاق للطاقة (على سبيل المثال ، التوصيلات ذات الأبعاد المقابلة ، أجهزة التعشيق السلبي لآليات تغيير القابض ، إلخ).
- منع إطلاق الطاقة من منطقة الخطر ، على سبيل المثال ، من خلال غطاء أمان ذي أبعاد مقابلة.
3. تعد الواجهات بين التشغيل العادي والتشغيل الخاص (على سبيل المثال ، أجهزة تشابك الأبواب ، وحواجز الضوء ، وحصائر الأمان) ضرورية لتمكين نظام التحكم في السلامة من التعرف تلقائيًا على وجود الأفراد.
المطالب وإجراءات السلامة في أوضاع التشغيل الخاصة
تتطلب بعض أوضاع التشغيل الخاصة (مثل الإعداد والبرمجة) على روبوت صناعي حركات يجب تقييمها مباشرة في موقع التشغيل. الهدف المتعلق بالسلامة هو عدم تعرض الأشخاص المعنيين للخطر. يجب أن تكون الحركات
- فقط من النمط والسرعة المجدولين
- لفترات طويلة فقط حسب التعليمات
- تلك التي يمكن إجراؤها فقط إذا أمكن ضمان عدم وجود أجزاء من جسم الإنسان في منطقة الخطر.
يمكن أن يتضمن الحل المقترح لهذا الهدف استخدام أنظمة تحكم تشغيل خاصة تسمح فقط بالحركات التي يمكن التحكم فيها وإدارتها باستخدام ضوابط معترف بها. وبالتالي يتم تقليل سرعة الحركات بأمان (تقليل الطاقة عن طريق توصيل محول عزل أو استخدام معدات مراقبة الحالة الآمنة من الفشل) ويتم الاعتراف بالحالة الآمنة قبل السماح بتشغيل التحكم (انظر الشكل 3).
الشكل 3. روبوت صناعي سداسي المحاور في قفص آمن مع بوابات مادية

متطلبات أنظمة التحكم في السلامة
يجب أن تكون إحدى ميزات نظام التحكم في السلامة أن وظيفة السلامة المطلوبة مضمونة للعمل عند ظهور أي عيوب. يجب توجيه آلات الروبوت الصناعية بشكل فوري تقريبًا من حالة خطرة إلى حالة آمنة. تشمل تدابير مراقبة السلامة اللازمة لتحقيق ذلك أهداف السلامة التالية:
- قد لا يؤدي أي خلل في نظام التحكم في السلامة إلى حدوث حالة خطرة.
- يجب تحديد عطل في نظام مراقبة السلامة (على الفور أو على فترات).
الحلول المقترحة لتوفير أنظمة موثوقة للتحكم في السلامة ستكون:
- تخطيط متكرر ومتنوع لأنظمة التحكم الكهروميكانيكية بما في ذلك دوائر الاختبار
- إعداد متكرر ومتنوع لأنظمة التحكم في المعالجات الدقيقة التي طورتها فرق مختلفة. يعتبر هذا النهج الحديث ليكون من بين الفن ؛ على سبيل المثال ، تلك المجهزة بحواجز إضاءة الأمان.
أهداف السلامة لبناء واستخدام الروبوتات الصناعية.
عندما يتم تصنيع الروبوتات الصناعية واستخدامها ، يُطلب من كل من المصنعين والمستخدمين تثبيت أحدث أدوات التحكم في السلامة. بصرف النظر عن جانب المسؤولية القانونية ، قد يكون هناك أيضًا التزام أخلاقي لضمان أن تكنولوجيا الروبوت هي أيضًا تقنية آمنة.
وضع التشغيل العادي
يجب توفير شروط السلامة التالية عندما تعمل أجهزة الروبوت في الوضع العادي:
- يجب تأمين مجال حركة الروبوت ومناطق المعالجة التي تستخدمها المعدات الطرفية بطريقة تمنع وصول الأشخاص يدويًا أو ماديًا إلى المناطق الخطرة نتيجة للحركات التلقائية.
- يجب توفير الحماية حتى لا تسبب قطع العمل أو الأدوات المتطايرة الضرر.
- يجب ألا يتعرض أي شخص للإصابة من الأجزاء أو الأدوات أو قطع العمل التي يخرجها الروبوت أو بسبب إطلاق الطاقة ، بسبب خلل في القابض (القابض) أو انقطاع التيار الكهربائي أو السرعة غير المسموح بها أو الاصطدام (الاصطدامات) أو قطعة (قطع) العمل المعيبة.
- لا يجوز إصابة أي شخص من جراء إطلاق الطاقة أو الأجزاء المنبعثة من المعدات الطرفية.
- يجب تصميم فتحات التغذية والإزالة لمنع الوصول اليدوي أو المادي إلى المناطق الخطرة نتيجة الحركات التلقائية. يجب أيضًا استيفاء هذا الشرط عند إزالة مادة الإنتاج. إذا تم تغذية الروبوت بمواد الإنتاج تلقائيًا ، فلن يتم إنشاء مناطق خطرة بواسطة فتحات التغذية والإزالة ومواد الإنتاج المتحركة.
أوضاع التشغيل الخاصة
يجب توفير شروط السلامة التالية عندما تعمل آلات الروبوت في أوضاع خاصة:
يجب منع ما يلي أثناء تصحيح الانهيار في عملية الإنتاج:
- الوصول اليدوي أو المادي إلى المناطق التي تكون خطرة بسبب الحركات التلقائية بواسطة الروبوت أو بواسطة المعدات الطرفية
- المخاطر التي تنشأ عن السلوك الخاطئ من جانب النظام أو من إدخال أمر غير مسموح به إذا كان الأشخاص أو أجزاء من الجسم في المنطقة المعرضة لحركات خطرة
- الحركات أو الظروف الخطرة التي تنشأ عن نقل أو إزالة مواد الإنتاج أو منتجات النفايات
- الإصابات الناجمة عن المعدات الطرفية
- إزالة الحركات التي يجب إجراؤها مع حراس (حراس) السلامة للتشغيل العادي ، على أن يتم تنفيذها فقط في نطاق التشغيل والسرعة ، وطالما طُلب منه ذلك فقط. بالإضافة إلى ذلك ، قد لا يتواجد أي شخص (أشخاص) أو أجزاء من الجسم في المنطقة المعرضة للخطر.
يجب ضمان الشروط الآمنة التالية أثناء الإعداد:
لا يجوز بدء أي حركات خطرة نتيجة لأمر خاطئ أو إدخال أمر غير صحيح.
- يجب ألا يؤدي استبدال آلة الروبوت أو الأجزاء الطرفية إلى أي حركات أو ظروف خطرة.
- إذا كان لا بد من إجراء الحركات مع حارس (حراس) السلامة للتشغيل العادي الذي تم إزالته عند إجراء عمليات الإعداد ، فقد يتم تنفيذ هذه الحركات فقط ضمن النطاق والسرعة الموجهين وطالما طُلب منه ذلك فقط. بالإضافة إلى ذلك ، قد لا يتواجد أي شخص (أشخاص) أو أجزاء من الجسم في المنطقة المعرضة للخطر.
- أثناء عمليات التثبيت ، يجب ألا تقوم المعدات الطرفية بأي حركات خطرة أو تبدأ في أي ظروف خطرة.
أثناء البرمجة ، تنطبق شروط السلامة التالية:
- يجب منع الوصول اليدوي أو المادي إلى المناطق الخطرة بسبب الحركات التلقائية.
- إذا تم إجراء الحركات مع إزالة حارس (حراس) السلامة للتشغيل العادي ، فيجب استيفاء الشروط التالية:
- (أ) يمكن تنفيذ الأمر بالتحرك فقط ، وطالما صدر فقط.
- (ب) يمكن تنفيذ الحركات التي يمكن التحكم فيها فقط (أي يجب أن تكون مرئية بوضوح وحركات منخفضة السرعة).
- (ج) لا يجوز بدء التحركات إلا إذا كانت لا تشكل خطرًا على المبرمج أو الأشخاص الآخرين.
- يجب ألا تشكل المعدات الطرفية خطرًا على المبرمج أو غيره من الأشخاص.
تتطلب عمليات الاختبار الآمنة الاحتياطات التالية:
امنع الوصول اليدوي أو المادي إلى المناطق الخطرة بسبب الحركات التلقائية.
- يجب ألا تكون المعدات الطرفية مصدر خطر.
عند فحص آلات الروبوت ، تشمل الإجراءات الآمنة ما يلي:
- إذا كان من الضروري الدخول إلى مجال حركة الروبوت لأغراض الفحص ، فلا يُسمح بذلك إلا إذا كان النظام في حالة آمنة.
- يجب منع المخاطر الناجمة عن السلوك الخاطئ من جانب النظام أو عن طريق إدخال أمر غير مسموح به.
- يجب ألا تكون المعدات الطرفية مصدر خطر لأفراد التفتيش.
غالبًا ما يتطلب استكشاف الأخطاء وإصلاحها بدء تشغيل آلة الروبوت عندما تكون في حالة خطرة ، ويجب تنفيذ إجراءات عمل آمنة خاصة مثل ما يلي:
- يجب منع الوصول إلى المناطق الخطرة نتيجة الحركات التلقائية.
- يجب منع بدء تشغيل وحدة القيادة نتيجة لأمر خاطئ أو إدخال أمر خاطئ.
- عند التعامل مع الجزء المعيب ، يجب منع جميع الحركات التي يقوم بها الروبوت.
- يجب منع الإصابات التي تسببها أجزاء الآلة التي يتم إخراجها أو سقوطها.
- إذا كان لابد من إجراء الحركات أثناء استكشاف الأخطاء وإصلاحها مع إزالة حارس (حراس) السلامة للتشغيل العادي ، فقد يتم تنفيذ هذه الحركات فقط ضمن النطاق والسرعة المحددة وطالما طُلب منها ذلك فقط. بالإضافة إلى ذلك ، قد لا يتواجد أي شخص (أشخاص) أو أجزاء من الجسم في المنطقة المعرضة للخطر.
- يجب منع الإصابات التي تسببها المعدات الطرفية.
قد يتطلب إصلاح العطل وأعمال الصيانة أيضًا بدء التشغيل عندما تكون الماكينة في حالة غير آمنة ، وبالتالي تتطلب الاحتياطات التالية:
- يجب ألا يكون الروبوت قادرًا على البدء.
- يجب أن يكون التعامل مع أجزاء الماكينة المختلفة ، إما يدويًا أو باستخدام معدات إضافية ، ممكنًا دون التعرض لخطر التعرض للمخاطر.
- يجب ألا يكون من الممكن لمس الأجزاء "الحية".
- يجب منع الإصابات الناجمة عن تسرب السوائل أو الوسائط الغازية.
- يجب منع الإصابات التي تسببها المعدات الطرفية.