Los robots industriales se encuentran en toda la industria dondequiera que se deban satisfacer demandas de alta productividad. El uso de robots, sin embargo, requiere el diseño, aplicación e implementación de los controles de seguridad apropiados para evitar la creación de peligros para el personal de producción, programadores, especialistas en mantenimiento e ingenieros de sistemas.
¿Por qué son peligrosos los robots industriales?
Una definición de robots es “máquinas automáticas en movimiento que son libremente programables y pueden operar con poca o ninguna interfaz humana”. Este tipo de máquinas se utilizan actualmente en una amplia variedad de aplicaciones en la industria y la medicina, incluida la formación. Los robots industriales se utilizan cada vez más para funciones clave, como nuevas estrategias de fabricación (CIM, JIT, producción ajustada, etc.) en instalaciones complejas. Su número y amplitud de aplicaciones y la complejidad de los equipos e instalaciones dan como resultado peligros como los siguientes:
- movimientos y secuencias de movimientos que son casi imposibles de seguir, ya que los movimientos de alta velocidad del robot dentro de su radio de acción a menudo se superponen con los de otras máquinas y equipos
- liberación de energía causada por partes voladoras o haces de energía como los emitidos por láseres o chorros de agua
- programabilidad libre en términos de dirección y velocidad
- susceptibilidad a la influencia de errores externos (p. ej., compatibilidad electromagnética)
- factores humanos.
Investigaciones en Japón indican que más del 50% de los accidentes laborales con robots pueden atribuirse a fallas en los circuitos electrónicos del sistema de control. En las mismas investigaciones, el “error humano” fue responsable de menos del 20%. La conclusión lógica de este hallazgo es que los peligros causados por fallas del sistema no pueden evitarse mediante medidas de comportamiento tomadas por los seres humanos. Por lo tanto, los diseñadores y operadores deben proporcionar e implementar medidas técnicas de seguridad (ver figura 1).
Figura 1. Sistema de control operativo especial para la configuración de un robot de soldadura móvil

Accidentes y Modos de Operación
Los accidentes fatales que involucran robots industriales comenzaron a ocurrir a principios de la década de 1980. Las estadísticas e investigaciones indican que la mayoría de los incidentes y accidentes no se producen en el funcionamiento normal (cumplimiento automático del encargo correspondiente). Cuando se trabaja con máquinas e instalaciones de robots industriales, se hace hincapié en los modos de funcionamiento especiales, como la puesta en marcha, la configuración, la programación, las pruebas, las comprobaciones, la resolución de problemas o el mantenimiento. En estos modos de funcionamiento, las personas suelen estar en una zona de peligro. El concepto de seguridad debe proteger al personal de eventos negativos en este tipo de situaciones.
Requisitos internacionales de seguridad
La Directiva de Maquinaria de la CEE de 1989 (89/392/CEE) (consulte el artículo “Principios de seguridad para máquinas herramienta CNC” en este capítulo y en otras partes de este Enciclopedia)) establece los principales requisitos de seguridad y salud de las máquinas. Se considera que una máquina es la suma total de partes o dispositivos interrelacionados, de los cuales al menos una parte o dispositivo puede moverse y, en consecuencia, tiene una función. En lo que respecta a los robots industriales, debe tenerse en cuenta que todo el sistema, no solo un único equipo en la máquina, debe cumplir con los requisitos de seguridad y estar equipado con los dispositivos de seguridad adecuados. El análisis de peligros y la evaluación de riesgos son métodos adecuados para determinar si se han cumplido estos requisitos (véase la figura 2).
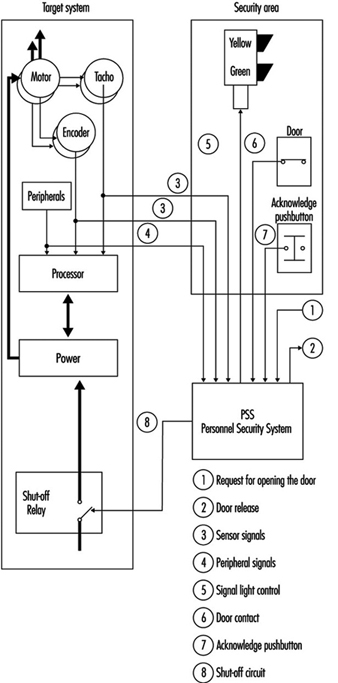
Figura 2. Diagrama de bloques para un sistema de seguridad del personal
Requisitos y medidas de seguridad en funcionamiento normal
El uso de la tecnología robótica impone exigencias máximas en el análisis de peligros, la evaluación de riesgos y los conceptos de seguridad. Por esta razón, los siguientes ejemplos y sugerencias pueden servir solo como pautas:
1. Dado el objetivo de seguridad de que debe evitarse el acceso manual o físico a áreas peligrosas que involucren movimientos automáticos, las soluciones sugeridas incluyen las siguientes:
- Impedir el acceso manual o físico a las zonas de peligro mediante barreras mecánicas.
- Utilice dispositivos de seguridad del tipo que responda cuando se le acerque (barreras de luz, tapetes de seguridad), y tenga cuidado de apagar la maquinaria de manera segura cuando se acceda a ella o se ingrese a ella.
- Permita el acceso manual o físico solo cuando todo el sistema esté en un estado seguro. Esto se puede lograr, por ejemplo, mediante el uso de dispositivos de enclavamiento con mecanismos de cierre en las puertas de acceso.
2. Dado el objetivo de seguridad de que ninguna persona resulte lesionada como resultado de la liberación de energía (piezas voladoras o haces de energía), las soluciones sugeridas incluyen:
- El diseño debe evitar cualquier liberación de energía (por ejemplo, conexiones dimensionadas correspondientemente, dispositivos de enclavamiento pasivos de pinzas para mecanismos de cambio de pinzas, etc.).
- Impida la liberación de energía de la zona de peligro, por ejemplo, mediante una cubierta de seguridad de dimensiones correspondientes.
3. Las interfaces entre el funcionamiento normal y el funcionamiento especial (p. ej., dispositivos de enclavamiento de puertas, barreras de luz, tapetes de seguridad) son necesarias para permitir que el sistema de control de seguridad reconozca automáticamente la presencia de personal.
Exigencias y Medidas de Seguridad en Modos Especiales de Operación
Ciertos modos de operación especiales (por ejemplo, configuración, programación) en un robot industrial requieren movimientos que deben evaluarse directamente en el sitio de operación. El objetivo de seguridad relevante es que ningún movimiento pueda poner en peligro a las personas involucradas. Los movimientos deben ser
- solo del estilo y velocidad programados
- prolongado solo el tiempo que se le indique
- las que sólo podrán realizarse si se puede garantizar que ninguna parte del cuerpo humano se encuentra en la zona de peligro.
Una solución sugerida para este objetivo podría involucrar el uso de sistemas especiales de control operativo que permitan solo movimientos controlables y manejables usando controles reconocibles. De este modo, la velocidad de los movimientos se reduce de manera segura (reducción de energía mediante la conexión de un transformador de aislamiento o el uso de un equipo de monitoreo de estado a prueba de fallas) y se reconoce la condición segura antes de permitir que se active el control (consulte la figura 3).
Figura 3. Robot industrial de seis ejes en una jaula de seguridad con puertas de material

Exigencias de los sistemas de control de seguridad
Una de las características de un sistema de control de seguridad debe ser que la función de seguridad requerida esté garantizada para funcionar siempre que surja cualquier falla. Las máquinas robóticas industriales deben ser dirigidas casi instantáneamente de un estado peligroso a un estado seguro. Las medidas de control de seguridad necesarias para lograr esto incluyen los siguientes objetivos de seguridad:
- Una falla en el sistema de control de seguridad no puede desencadenar un estado peligroso.
- Se debe identificar una falla en el sistema de control de seguridad (inmediatamente o a intervalos).
Las soluciones sugeridas para proporcionar sistemas de control de seguridad confiables serían:
- Disposición redundante y diversa de los sistemas de control electromecánicos, incluidos los circuitos de prueba.
- configuración redundante y diversa de sistemas de control por microprocesador desarrollados por diferentes equipos. Este enfoque moderno se considera de vanguardia; por ejemplo, los completos con barreras de luz de seguridad.
Objetivos de Seguridad para la Construcción y Uso de Robots Industriales.
Cuando se construyen y utilizan robots industriales, tanto los fabricantes como los usuarios deben instalar controles de seguridad de última generación. Aparte del aspecto de la responsabilidad legal, también puede haber una obligación moral de garantizar que la tecnología robótica sea también una tecnología segura.
Modo de funcionamiento normal
Se deben proporcionar las siguientes condiciones de seguridad cuando las máquinas robóticas funcionan en el modo normal:
- El campo de movimiento del robot y las áreas de procesamiento utilizadas por los equipos periféricos deben protegerse de manera que se impida el acceso manual o físico de personas a las áreas peligrosas como resultado de los movimientos automáticos.
- Se debe proporcionar protección para que las piezas de trabajo o las herramientas que vuelan no puedan causar daños.
- Ninguna persona debe resultar lesionada por piezas, herramientas o piezas de trabajo expulsadas por el robot o por la liberación de energía, debido a pinzas defectuosas, corte de energía de las pinzas, velocidad inadmisible, colisión(es) o piezas de trabajo defectuosas.
- Ninguna persona puede resultar lesionada por la liberación de energía o por piezas expulsadas por equipos periféricos.
- Las aberturas de alimentación y extracción deben estar diseñadas para evitar el acceso manual o físico a áreas que son peligrosas como resultado de movimientos automáticos. Esta condición también debe cumplirse cuando se retira el material de producción. Si el material de producción se alimenta al robot automáticamente, no se pueden crear áreas peligrosas por las aberturas de alimentación y extracción y el material de producción en movimiento.
Modos de operación especiales
Se deben proporcionar las siguientes condiciones de seguridad cuando las máquinas robóticas funcionan en modos especiales:
Durante la subsanación de una avería en el proceso de producción debe evitarse lo siguiente:
- acceso manual o físico a áreas que son peligrosas debido a los movimientos automáticos del robot o del equipo periférico
- peligros que se derivan de un comportamiento defectuoso por parte del sistema o de una entrada de comando inadmisible si hay personas o partes del cuerpo en el área expuesta a movimientos peligrosos
- movimientos o condiciones peligrosas iniciadas por el movimiento o eliminación de material de producción o productos de desecho
- lesiones causadas por equipos periféricos
- movimientos que deban realizarse con la(s) protección(es) de seguridad retiradas para el funcionamiento normal, que se realizarán únicamente dentro del alcance y la velocidad operativos, y únicamente durante el tiempo indicado. Además, ninguna persona o partes del cuerpo pueden estar presentes en el área de riesgo.
Se deben garantizar las siguientes condiciones de seguridad durante la instalación:
No se pueden iniciar movimientos peligrosos como resultado de un comando defectuoso o entrada de comando incorrecta.
- La sustitución de la máquina robótica o de las piezas periféricas no debe iniciar ningún movimiento o condición peligrosa.
- Si los movimientos se deben realizar con la(s) protección(es) de seguridad para el funcionamiento normal retiradas al realizar las operaciones de preparación, dichos movimientos se pueden realizar solo dentro del alcance y la velocidad indicados y solo durante el tiempo que se indique. Además, ninguna persona o partes del cuerpo pueden estar presentes en el área de riesgo.
- Durante las operaciones de configuración, el equipo periférico no debe realizar ningún movimiento peligroso ni iniciar condiciones peligrosas.
Durante la programación, se aplican las siguientes condiciones de seguridad:
- Debe evitarse el acceso manual o físico a las zonas peligrosas debido a los movimientos automáticos.
- Si los movimientos se realizan con la(s) protección(es) de seguridad para el funcionamiento normal retiradas, deben cumplirse las siguientes condiciones:
- (a) Solo se puede ejecutar la orden de movimiento, y solo durante el tiempo que se emita.
- (b) Sólo se pueden realizar movimientos controlables (es decir, deben ser movimientos claramente visibles y de baja velocidad).
- (c) Los movimientos pueden iniciarse solo si no constituyen un peligro para el programador u otras personas.
- Los equipos periféricos no deben representar un peligro para el programador u otras personas.
Las operaciones de prueba seguras requieren las siguientes precauciones:
Impedir el acceso manual o físico a zonas peligrosas por movimientos automáticos.
- Los equipos periféricos no deben ser una fuente de peligro.
Al inspeccionar máquinas robóticas, los procedimientos seguros incluyen lo siguiente:
- Si es necesario entrar en el campo de movimiento del robot con fines de inspección, esto solo está permitido si el sistema se encuentra en un estado seguro.
- Deben evitarse los peligros causados por un comportamiento defectuoso por parte del sistema o por una entrada de comando inadmisible.
- Los equipos periféricos no deben ser una fuente de peligro para el personal de inspección.
La solución de problemas a menudo requiere poner en marcha la máquina robot mientras se encuentra en una condición potencialmente peligrosa, y se deben implementar procedimientos especiales de trabajo seguro como los siguientes:
- Debe impedirse el acceso a zonas peligrosas por movimientos automáticos.
- Debe evitarse la puesta en marcha de una unidad de accionamiento como resultado de un comando defectuoso o una entrada de comando falsa.
- Al manipular una pieza defectuosa, se deben evitar todos los movimientos por parte del robot.
- Deben evitarse lesiones causadas por piezas de la máquina que salgan despedidas o se caigan.
- Si, durante la resolución de problemas, se deben realizar movimientos con la(s) protección(es) de seguridad quitadas para el funcionamiento normal, dichos movimientos solo se pueden realizar dentro del alcance y la velocidad establecidos y solo durante el tiempo indicado. Además, ninguna persona o partes del cuerpo pueden estar presentes en el área de riesgo.
- Deben evitarse las lesiones causadas por equipos periféricos.
La reparación de una falla y el trabajo de mantenimiento también pueden requerir la puesta en marcha mientras la máquina se encuentra en condiciones inseguras y, por lo tanto, requieren las siguientes precauciones:
- El robot no debe poder arrancar.
- El manejo de varias partes de la máquina, ya sea manualmente o con equipos auxiliares, debe ser posible sin riesgo de exposición a peligros.
- No debe ser posible tocar partes que estén “vivas”.
- Deben evitarse las lesiones causadas por el escape de medios líquidos o gaseosos.
- Deben evitarse las lesiones causadas por equipos periféricos.