人は、事故に至るまでのほとんどのプロセスと、事故防止を目的とした対策の大部分において重要な役割を果たしています。 したがって、事故プロセスのモデルが、人間の行動と事故との関連性について明確な指針を提供することが重要です。 そうして初めて、体系的な事故調査を実施して、これらの関連性を理解し、職場の設計とレイアウト、労働者と管理者の訓練、選択、動機付け、および労働環境における変化の影響を予測することが可能になります。作業および管理の安全システムの組織。
初期のモデリング
1960 年代まで、事故における人的および組織的要因のモデル化はかなり単純なものでした。 これらのモデルは、スキル、性格要因、動機要因、疲労などの大まかな細分化を超えて、事故に関連する人間の要素を区別していませんでした。 事故は、差別化されていない解決策が求められる未分化な問題と見なされていました (XNUMX 世紀前の医師は、患者から出血させることで、当時は差別化されていなかった多くの病気を治そうとしたように)。
Surry (1969) および Hale と Hale (1972) によって発行された事故研究文献のレビューは、より深く掘り下げて、異なる病因を反映するタイプに事故を分類するための基礎を提供する最初の試みの XNUMX つでした。人間・技術・環境関係の側面。 これらのレビューの両方で、著者は認知心理学の蓄積された洞察を利用して、存在するリスクを認識して制御しようとすることで、環境とその危険に対応する情報処理プロセッサとして人々を提示するモデルを開発しました。 これらのモデルでは、事故は、XNUMX つまたは複数の制御ステップが満足に実行されない場合に発生する、この制御プロセスのさまざまな部分の失敗として考慮されました。 これらのモデルでは、失敗やエラーを個人のせいにするのではなく、タスクやシステムの行動上の要求と、行動が生成され組織化される方法に固有の可能性との間のミスマッチに焦点を当てる方向にも重点が移されました。
人間の行動
Hale と Glendon (1987) によるこれらのモデルのその後の開発は、それらを Rasmussen と Reason (Reason 1990) の研究に関連付け、人間の行動を XNUMX つのレベルの処理に分類しました。
- 日常的な状況に対する自動的でほとんど無意識の反応 (スキルに基づく行動)
- 学習したルールを、一般的な状況の正しい診断に一致させる (ルールに基づく行動)
- 新しい状況での意識的で時間のかかる問題解決 (知識に基づく行動)。
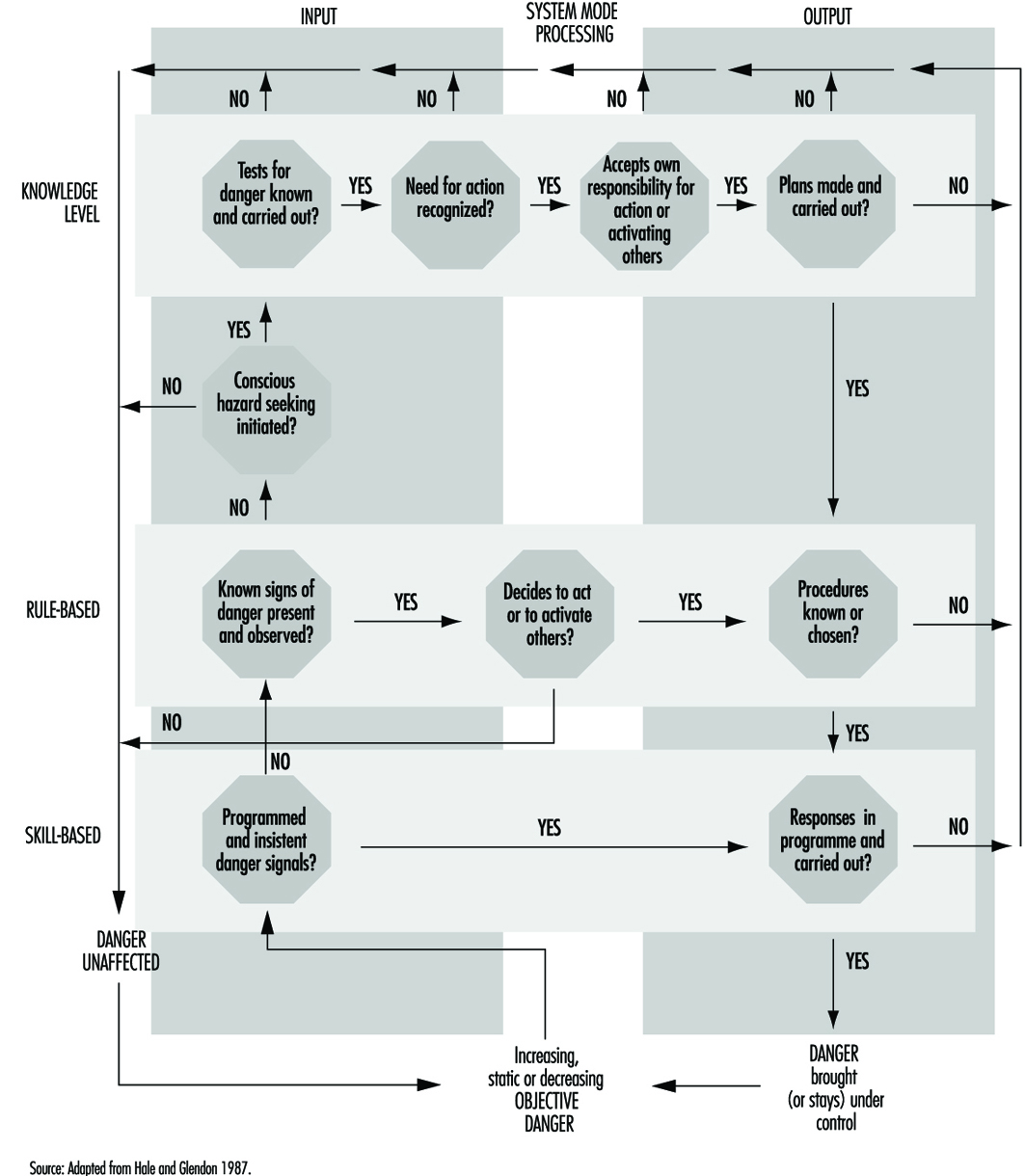
典型的な制御の失敗は、行動のレベルによって異なり、事故の種類や事故を制御するために使用される適切な安全対策も異なります。 より最近の洞察で更新されたヘイルとグレンドンのモデルが図 1 に示されています。これは、完全なモデルに到達するために連続して説明される多数のビルディング ブロックで構成されています。
図 1. 危険に直面したときの個々の問題解決
偏差モデルへのリンク
ヘイルとグレンドンのモデルの出発点は、あらゆる職場やシステムで危険が進化する方法です。 危険は常に存在すると考えられていますが、ハードウェア (機器の設計や安全装置など)、人 (熟練したオペレーターなど)、手順 (予防保守など) に関連する多数の事故防止対策によって制御されています。および組織(例:重要な安全タスクに対する責任の割り当て)。 関連するすべての危険と潜在的な危険が予見され、それらに対する予防措置が適切に設計および選択されていれば、損害は発生しません。 この望ましい正常な状態からの逸脱が発生した場合にのみ、事故プロセスが開始されます。 (これらの偏差モデルについては、「事故偏差モデル」で詳しく説明します。)
システム内の人々の任務は、それぞれの不測の事態に対して正しい手順を使用し、安全装置を注意して取り扱い、必要なチェックと調整を行うことにより、逸脱を回避するために事故防止手段が適切に機能することを保証することです。 人々はまた、発生する可能性のある逸脱の多くを検出して修正し、システムとその予防措置を新しい要求、新しい危険、および新しい洞察に適応させるというタスクを負っています。 これらすべてのアクションは、危険に関連する検出および制御タスクとして、Hale および Glendon モデルでモデル化されています。
問題解決
ヘイルとグレンドンのモデルは、問題解決のタスクとして危険を制御する際の人間の行動の役割を概念化しています。 このようなタスクの手順は、図 2 のように一般的に説明できます。
図 2. 問題解決のサイクル

このタスクは、図 2 のステップ 1994 で設定された基準によって推進される、目標を追求するプロセスです。これらは、労働者が自分で設定した、または雇用主、製造業者、または立法者によって設定された安全基準です。 このモデルには、差し迫った、または将来の危険に直面している個々の労働者だけでなく、プロセスまたは業界からの既存の危険と、新しいテクノロジーまたは設計段階の製品。 したがって、安全管理システムは、人間の行動と一貫した方法でモデル化することができ、安全管理の設計者または評価者は、組織のさまざまなレベルの連動するタスクに適切に焦点を当てた、または広い視野を取ることができます (Hale et al. XNUMX)。
これらのステップを危険に直面した個人の行動に適用すると、図 3 が得られます。各ステップのいくつかの例は、個人のタスクを明確にすることができます。 前述のように、ある程度の危険は、あらゆる状況で常に存在すると想定されています。 問題は、個々の労働者がその危険に対応できるかどうかです。 これは、危険信号がどれほど執拗であるか、および作業者自身の危険に対する意識とリスクの許容レベルの基準に部分的に依存します。 機械の一部が予期せず赤熱したり、フォークリフトが高速で接近したり、ドアの下から煙が出始めたりすると、個々の労働者はすぐにスキップして行動の必要性を検討したり、自分や他の人が何をすべきかを決定したりすることさえあります。できる。
図 3. 危険に直面したときの行動
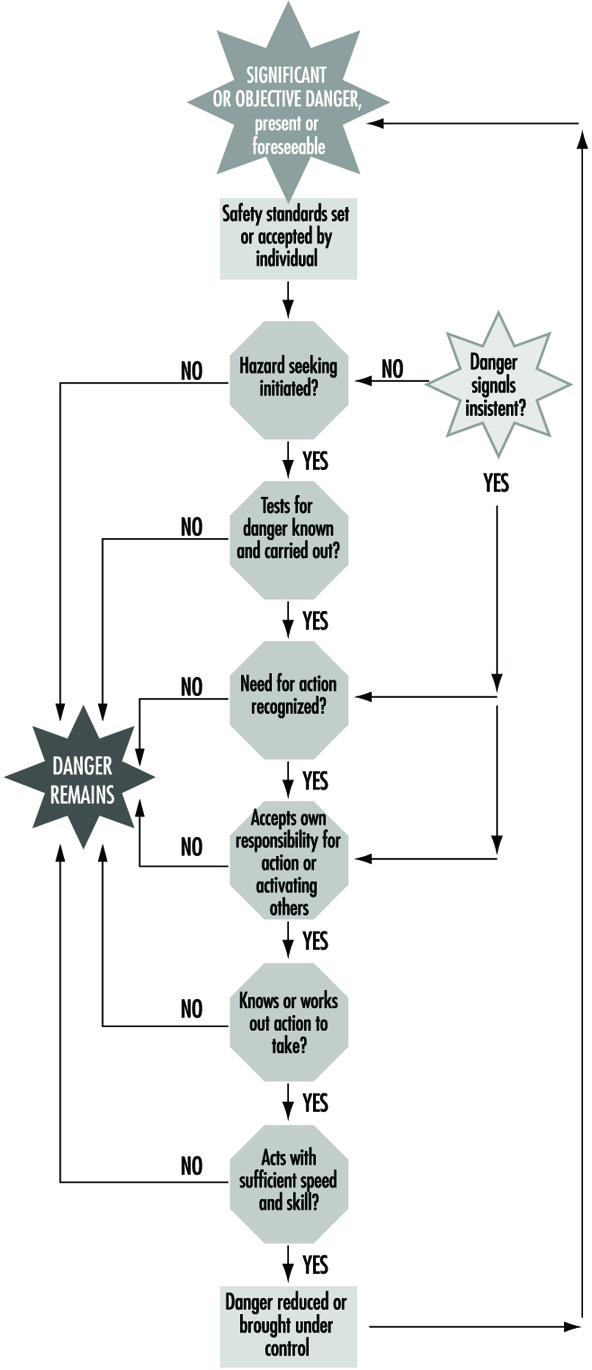
このような差し迫った危険の状況は、ほとんどの業界ではまれであり、差し迫った危険がはるかに少ないときに、危険を制御するために労働者を活性化することが通常望ましい. たとえば、労働者はマシン ガードのわずかな摩耗を認識して報告し、一定の騒音レベルに何年もさらされ続けると耳が聞こえなくなることを認識する必要があります。 設計者は、初心者が提案した新製品を危険な方法で使用する可能性があることを予測する必要があります。
これを行うには、すべての安全責任者は、危険が存在する、または存在する可能性を最初に考慮する必要があります。 危険の考慮は、一部は個人の問題であり、一部は経験の問題です。 また、トレーニングによって奨励し、プロセスの設計および実行段階でタスクと手順の明示的な部分にすることで保証することもできます。これにより、同僚や上司によって確認および奨励される場合があります。 第二に、労働者と監督者は、危険の兆候を予測して認識する方法を知っていなければなりません。 適切な注意力を確保するためには、潜在的な事故シナリオ、つまり、制御不能や損害につながる可能性のある兆候や一連の兆候を認識することに慣れる必要があります。 これは部分的には、プロセスが制御不能になる方法、騒音が聴覚を損なう方法、海溝がいつどのように崩壊するかなど、原因と結果のネットワークを理解する問題です。
同様に重要なのは、創造的な不信の態度です。 これには、ツール、機械、およびシステムが誤用されたり、うまくいかなかったり、設計者の意図とは異なる特性や相互作用を示したりする可能性があることを考慮する必要があります。 起こりうる失敗を予測し、それらを排除または制御する機会を与えることにより、「マーフィーの法則」(失敗する可能性のあるものはすべて失敗する)を創造的に適用します。 そのような態度は、知識と理解とともに、次のステップ、つまり、ある種の危険が行動を正当化するのに十分な可能性または深刻であると本当に信じるのにも役立ちます.
行動が必要なほど危険なものにレッテルを貼ることは、部分的には性格の問題です。 たとえば、人がテクノロジーに対してどれほど悲観的であるかに関係している可能性があります。 さらに重要なことは、「過去に失敗したことはありますか?」などの質問を労働者に自問させるような経験に強く影響されることです。 または「何年も同じレベルのリスクで事故なく機能していましたか?」 リスク認識に関する研究結果、およびリスク コミュニケーションや事故や事件の経験に関するフィードバックによってリスク認識に影響を与えようとする試みに関する研究結果は、他の記事でより詳細に説明されています。
何らかの行動の必要性が認識されたとしても、労働者は多くの理由で行動を起こさないことがあります。 彼らは何をすべきかわからない。 彼らは状況を変えることはできないと考えています(「それはこの業界で働くことのほんの一部です」)。 または、潜在的な問題を報告したことに対する報復を恐れています。 ここでは、原因と結果、および事故に対する責任の帰属と事故防止に関する信念と知識が重要です。 たとえば、事故の主な原因は不注意で事故を起こしやすい労働者であると考えている監督者は、おそらくそのような労働者を自分のセクションから排除することを除いて、自分で行動する必要はないと考えるでしょう。 この段階では、行動を起こすことができ、行動を起こすべき人々を動員し、調整するための効果的なコミュニケーションも不可欠です。
残りのステップは、危険を制御するために何をすべきかの知識と、適切な行動をとるために必要なスキルに関係しています. この知識はトレーニングと経験によって獲得されますが、優れた設計は、危険を回避したり危険から身を守るために、特定の結果を達成する方法を明らかにすることで大いに役立ちます。もしくは回避行動。 操作マニュアルやコンピュータ サポート システムなどの優れた情報リソースは、監督者や労働者が日々の活動の過程で利用できない知識にアクセスするのに役立ちます。 最後に、必要な対応アクションを適切なタイミングで十分に正確に実行して成功させることができるかどうかは、スキルと実践によって決まります。 これに関連して、難しいパラドックスが生じます。人々がより警戒し、備えができていればいるほど、またハードウェアの信頼性が高ければ高いほど、緊急時の手順が必要になる頻度は少なくなり、それらを実行するために必要なスキルのレベルを維持することが難しくなります。呼ばれたらアウト。
スキル、ルール、知識に基づく行動とのリンク
ヘイルとグレンドン モデルの最後の要素で、図 3 になります 図 1 には、Reason と Rasmussen の作品へのリンクが追加されています。 この研究は、人間の機能のさまざまな側面を含み、さまざまなタイプと程度の障害またはエラーの影響を受ける、スキルベース、ルールベース、知識ベースの XNUMX つの異なるレベルの意識的制御で行動を明らかにできることを強調しました。外部信号または内部処理障害。
スキルベース。 スキルベースのレベルは非常に信頼性が高いですが、邪魔されたり、別の同様のルーチンが制御を取得したりすると、失効やスリップが発生する可能性があります。 このレベルは、差し迫った、またはより遠く離れた危険を示す既知の信号への自動応答を含む、日常的な行動の種類に特に関連しています。 ノミを研いでいる間は指を砥石から離しておく、車を道路上に保つためにハンドルを切る、飛んでくる物体を避けるためにかがむなど、反応は既知であり、実践されているルーチンです。 応答は非常に自動化されているため、作業員は自分が積極的に危険を制御していることにさえ気付いていない可能性があります。
ルールベース。 ルールベースのレベルは、一連の既知のルーチンまたはルールから状況に適したものを選択することに関係しています。安全ゴーグルを酸で作業する場合 (粉塵を扱う場合とは対照的に)、または管理者として、短い非公式のチェックではなく、新しいプラントの完全な安全レビューを実行することを決定します。 ここでのエラーは、多くの場合、選択を実際の状況に一致させるのに十分な時間が費やされなかったり、状況を理解するために観察ではなく期待に頼ったり、外部情報に惑わされて間違った診断を下したりすることに関連しています。 ヘイルとグレンドンのモデルでは、このレベルでの行動は、危険を検出し、慣れ親しんだ状況で正しい手順を選択することに特に関連しています。
知識ベース。 知識ベースのレベルは、進行中の状況に対処するための既存の計画や手順が存在しない場合にのみ使用されます。 これは特に、設計段階での新しい危険の認識、安全検査中の予期しない問題の検出、または予期しない緊急事態への対処に当てはまります。 このレベルは、図 1 の上部にあるステップで優勢です。これは、予測可能性と信頼性が最も低い操作モードですが、潜在的な危険を検出し、逸脱から回復する際に、機械やコンピューターが人間に取って代わることができないモードでもあります。
すべての要素をまとめると、図 1 の結果になります。これは、過去の事故で人間の行動のどこで失敗が発生したかを分類するためのフレームワークと、特定の状況またはタスクに先立って危険を制御する際に人間の行動を最適化するために何ができるかを分析するためのフレームワークを提供します。事故。