Os seres humanos desempenham papéis importantes na maioria dos processos que levam a acidentes e na maioria das medidas destinadas à prevenção de acidentes. Portanto, é vital que os modelos do processo de acidentes forneçam orientações claras sobre as ligações entre ações humanas e acidentes. Só assim será possível realizar uma investigação sistemática de acidentes de forma a compreender estas ligações e fazer previsões sobre o efeito das alterações na conceção e disposição dos locais de trabalho, na formação, seleção e motivação dos trabalhadores e gestores, e na organização dos sistemas de segurança do trabalho e de gestão.
Modelagem inicial
Até a década de 1960, a modelagem de fatores humanos e organizacionais em acidentes era pouco sofisticada. Esses modelos não diferenciaram elementos humanos relevantes para acidentes além de subdivisões grosseiras, como habilidades, fatores de personalidade, fatores motivacionais e fadiga. Os acidentes eram vistos como problemas indiferenciados para os quais se procuravam soluções indiferenciadas (como há dois séculos os médicos procuravam curar muitas doenças então indiferenciadas sangrando o paciente).
As revisões da literatura de pesquisa de acidentes publicadas por Surry (1969) e por Hale e Hale (1972) estavam entre as primeiras tentativas de aprofundar e oferecer uma base para classificar os acidentes em tipos que refletem etiologias diferenciadas, que estavam ligadas a falhas em diferentes aspectos das relações homem-tecnologia-ambiente. Em ambas as revisões, os autores se basearam nos insights acumulados da psicologia cognitiva para desenvolver modelos que apresentam as pessoas como processadores de informações, respondendo ao seu ambiente e seus perigos, tentando perceber e controlar os riscos presentes. Acidentes foram considerados nestes modelos como falhas de diferentes partes deste processo de controle que ocorrem quando uma ou mais das etapas de controle não funcionam satisfatoriamente. A ênfase também mudou nesses modelos, deixando de culpar o indivíduo por falhas ou erros e concentrando-se na incompatibilidade entre as demandas comportamentais da tarefa ou sistema e as possibilidades inerentes à forma como o comportamento é gerado e organizado.
Comportamento Humano
Desenvolvimentos posteriores desses modelos por Hale e Glendon (1987) os ligaram ao trabalho de Rasmussen e Reason (Reason 1990), que classificou o comportamento humano em três níveis de processamento:
- respostas automáticas e amplamente inconscientes a situações de rotina (comportamento baseado em habilidades)
- combinar as regras aprendidas com um diagnóstico correto da situação prevalecente (comportamento baseado em regras)
- resolução consciente e demorada de problemas em situações novas (comportamento baseado no conhecimento).
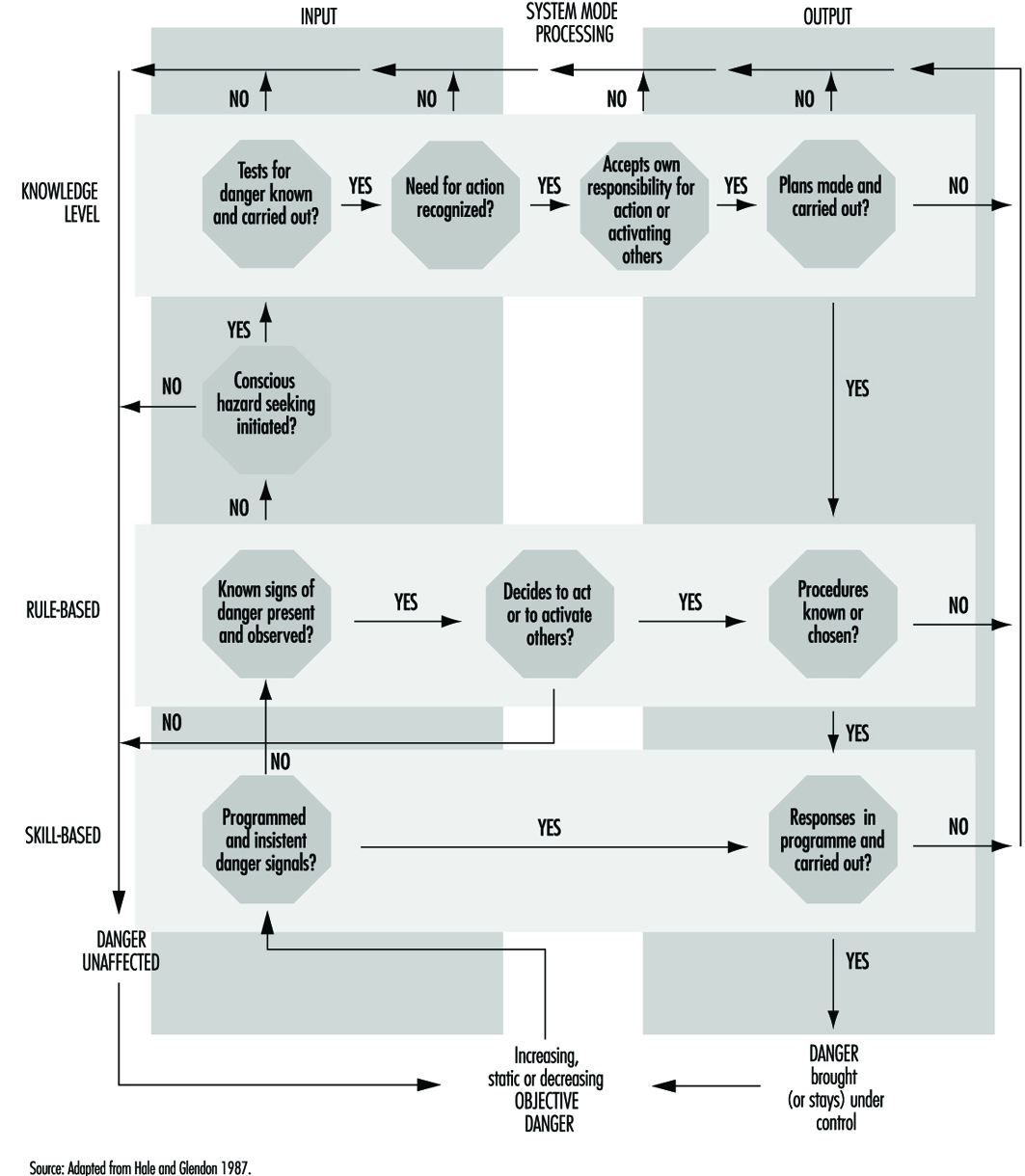
As falhas típicas de controle diferem de um nível de comportamento para outro, assim como os tipos de acidentes e as medidas de segurança apropriadas usadas para controlá-los. O modelo de Hale e Glendon, atualizado com percepções mais recentes, é representado na figura 1. Ele é composto de vários blocos de construção que serão explicados sucessivamente para chegar ao modelo completo.
Figura 1. Resolução individual de problemas diante do perigo
Link para modelos de desvio
O ponto de partida do modelo de Hale e Glendon é a forma como o perigo evolui em qualquer local de trabalho ou sistema. O perigo é considerado sempre presente, mas mantido sob controle por um grande número de medidas de prevenção de acidentes ligadas ao hardware (por exemplo, design de equipamentos e salvaguardas), pessoas (por exemplo, operadores qualificados), procedimentos (por exemplo, manutenção preventiva) e organização (por exemplo, alocação de responsabilidade para tarefas críticas de segurança). Desde que todos os perigos relevantes e perigos potenciais tenham sido previstos e as medidas preventivas para eles tenham sido adequadamente projetadas e escolhidas, nenhum dano ocorrerá. Somente se ocorrer um desvio desse estado normal desejado, o processo de acidente pode começar. (Esses modelos de desvio são tratados em detalhes em “Modelos de desvio de acidentes”.)
A tarefa das pessoas do sistema é garantir o bom funcionamento das medidas de prevenção de acidentes para evitar desvios, utilizando os procedimentos corretos para cada eventualidade, manuseando com cuidado os equipamentos de segurança e fazendo as verificações e ajustes necessários. As pessoas também têm a tarefa de detectar e corrigir muitos dos desvios que podem ocorrer e de adaptar o sistema e suas medidas preventivas a novas demandas, novos perigos e novas percepções. Todas essas ações são modeladas no modelo de Hale e Glendon como tarefas de detecção e controle relacionadas a um perigo.
Solução de problemas
O modelo de Hale e Glendon conceitua o papel da ação humana no controle do perigo como uma tarefa de resolução de problemas. As etapas dessa tarefa podem ser descritas genericamente como na figura 2.
Figura 2. Ciclo de resolução de problemas
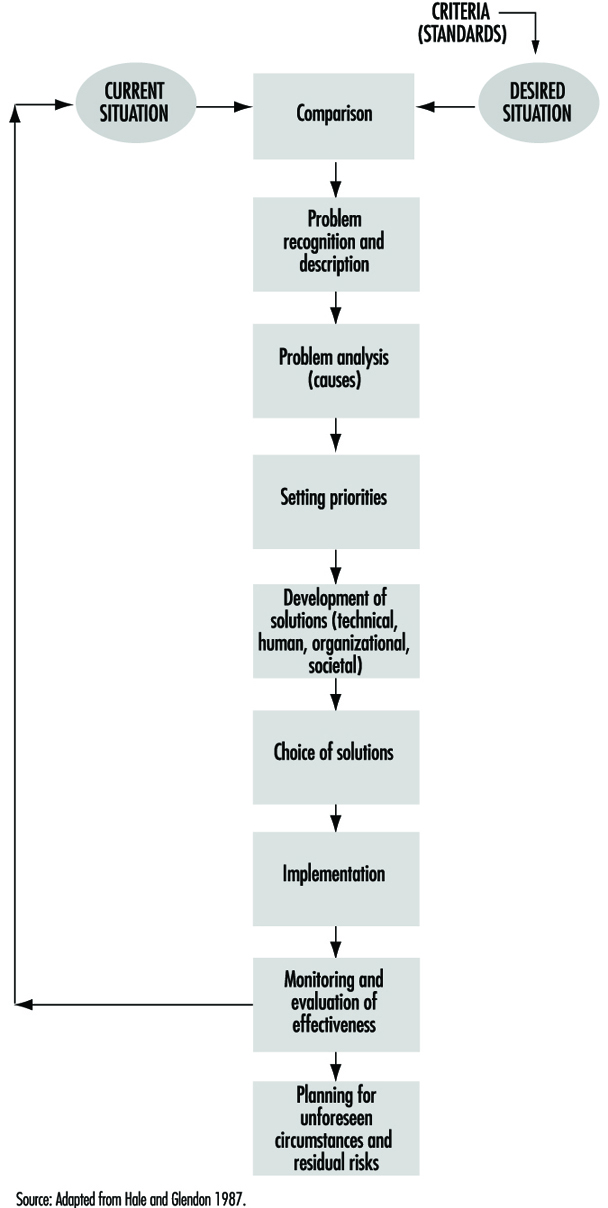
Esta tarefa é um processo de busca de objetivos, guiado pelos padrões definidos na etapa um da figura 2. Esses são os padrões de segurança que os trabalhadores estabelecem para si mesmos ou que são definidos por empregadores, fabricantes ou legisladores. O modelo tem a vantagem de poder ser aplicado não apenas a trabalhadores individuais confrontados com perigo iminente ou futuro, mas também a grupos de trabalhadores, departamentos ou organizações com o objetivo de controlar tanto o perigo existente de um processo ou indústria quanto o perigo futuro de nova tecnologia ou produtos na fase de projeto. Portanto, os sistemas de gerenciamento de segurança podem ser modelados de maneira consistente com o comportamento humano, permitindo que o projetista ou avaliador de gerenciamento de segurança tenha uma visão apropriadamente focada ou ampla das tarefas interligadas de diferentes níveis de uma organização (Hale et al. 1994).
Aplicando essas etapas ao comportamento individual diante do perigo, obtemos a figura 3. Alguns exemplos de cada etapa podem esclarecer a tarefa do indivíduo. Presume-se que algum grau de perigo, conforme declarado acima, esteja presente o tempo todo em todas as situações. A questão é se um trabalhador individual responde a esse perigo. Isso dependerá em parte de quão insistentes são os sinais de perigo e em parte da própria consciência do perigo do trabalhador e dos padrões de nível aceitável de risco. Quando uma peça de maquinário inesperadamente brilha em brasa, ou uma empilhadeira se aproxima em alta velocidade, ou fumaça começa a vazar por baixo da porta, os trabalhadores individuais passam imediatamente a considerar a necessidade de ação, ou mesmo a decidir o que eles ou outra pessoa pode fazer.
Figura 3. Comportamento diante do perigo
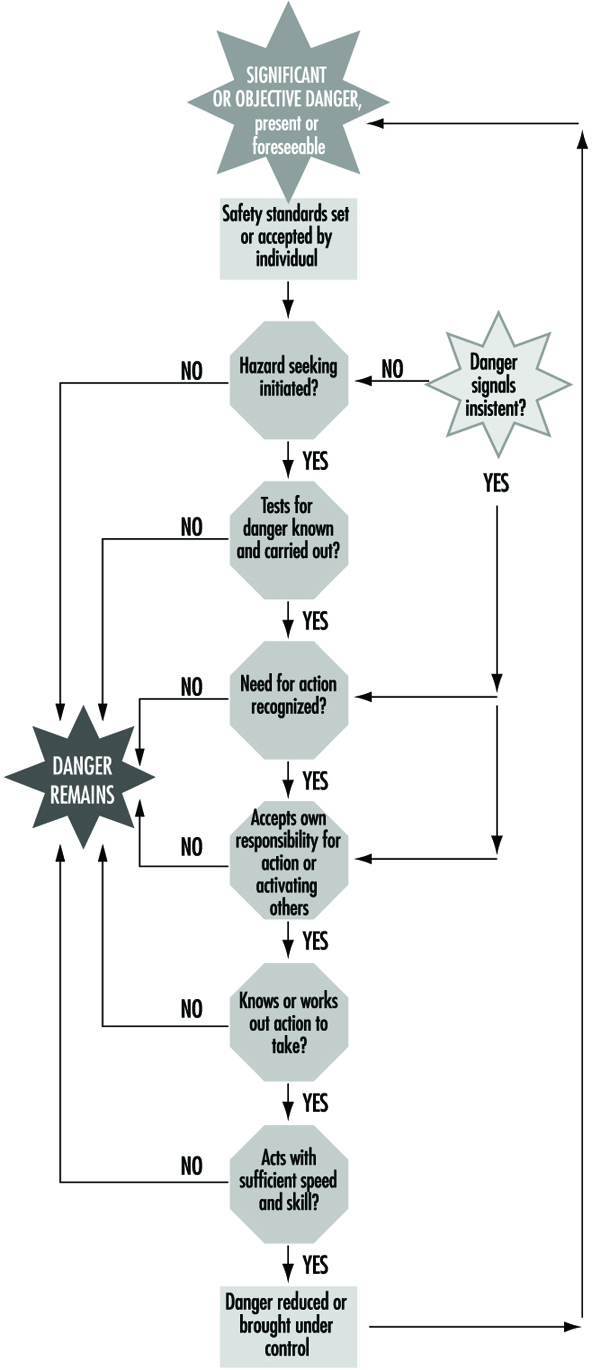
Essas situações de perigo iminente são raras na maioria das indústrias, e normalmente é desejável ativar os trabalhadores para controlar o perigo quando ele é muito menos iminente. Por exemplo, os trabalhadores devem reconhecer um leve desgaste na proteção da máquina e denunciá-lo, e perceber que um determinado nível de ruído os deixará surdos se forem expostos continuamente a ele por alguns anos. Os projetistas devem antecipar que um trabalhador novato pode estar sujeito a usar seu novo produto proposto de uma forma que pode ser perigosa.
Para fazer isso, todas as pessoas responsáveis pela segurança devem primeiro considerar a possibilidade de que o perigo está ou estará presente. A consideração do perigo é em parte uma questão de personalidade e em parte de experiência. Também pode ser estimulado por treinamento e garantido tornando-o parte explícita de tarefas e procedimentos nas fases de desenho e execução de um processo, onde pode ser confirmado e incentivado por colegas e superiores. Em segundo lugar, os trabalhadores e supervisores devem saber antecipar e reconhecer os sinais de perigo. Para garantir a qualidade adequada de alerta, eles devem se acostumar a reconhecer possíveis cenários de acidentes – isto é, indicações e conjuntos de indicações que podem levar à perda de controle e, portanto, a danos. Isso é em parte uma questão de entender as redes de causa e efeito, por exemplo, como um processo pode ficar fora de controle, como o ruído prejudica a audição ou como e quando uma trincheira pode desabar.
Igualmente importante é uma atitude de desconfiança criativa. Isso envolve considerar que ferramentas, máquinas e sistemas podem ser mal utilizados, dar errado ou apresentar propriedades e interações fora das intenções de seus projetistas. Aplica a “Lei de Murphy” (o que pode dar errado dará errado) de forma criativa, antecipando possíveis falhas e dando a oportunidade de eliminá-las ou controlá-las. Tal atitude, junto com conhecimento e compreensão, também ajuda no próximo passo – isto é, em realmente acreditar que algum tipo de perigo é suficientemente provável ou sério para justificar uma ação.
Rotular algo como perigoso o suficiente para exigir ação é, novamente, em parte, uma questão de personalidade; por exemplo, pode ter a ver com o quão pessimista uma pessoa pode ser em relação à tecnologia. Mais importante, é fortemente influenciado pelo tipo de experiência que levará os trabalhadores a se fazerem perguntas como: “Isso deu errado no passado?” ou “Trabalha há anos com o mesmo nível de risco sem acidentes?” Os resultados da pesquisa sobre a percepção de risco e sobre as tentativas de influenciá-la por meio de comunicação de risco ou feedback sobre acidentes e experiências de incidentes são fornecidos com mais detalhes em outros artigos.
Mesmo que se perceba a necessidade de alguma ação, os trabalhadores podem não agir por muitas razões: eles não acham, por exemplo, que cabe a eles interferir no trabalho de outra pessoa; eles não sabem o que fazer; eles veem a situação como imutável (“é apenas parte de trabalhar nesta indústria”); ou temem represálias por relatar um problema potencial. Crenças e conhecimentos sobre causa e efeito e sobre a atribuição de responsabilidade por acidentes e prevenção de acidentes são importantes aqui. Por exemplo, supervisores que consideram que os acidentes são em grande parte causados por trabalhadores descuidados e propensos a acidentes não verão nenhuma necessidade de ação de sua parte, exceto talvez para eliminar esses trabalhadores de sua seção. Comunicações eficazes para mobilizar e coordenar as pessoas que podem e devem agir também são vitais nesta etapa.
As etapas restantes dizem respeito ao conhecimento do que fazer para controlar o perigo e às habilidades necessárias para tomar as medidas apropriadas. Esse conhecimento é adquirido por treinamento e experiência, mas um bom design pode ajudar muito, tornando óbvio como atingir um determinado resultado para evitar o perigo ou para se proteger dele - por exemplo, por meio de uma parada ou desligamento de emergência, ou uma ação de evitar. Bons recursos de informação, como manuais de operações ou sistemas de suporte de computador, podem ajudar os supervisores e trabalhadores a obter acesso ao conhecimento que não está disponível para eles no curso da atividade do dia-a-dia. Finalmente, a habilidade e a prática determinam se a ação de resposta necessária pode ser realizada com precisão suficiente e no tempo certo para torná-la bem-sucedida. Um paradoxo difícil surge a esse respeito: quanto mais alertas e preparados estiverem as pessoas, e quanto mais confiável for o hardware, menos frequentemente os procedimentos de emergência serão necessários e mais difícil será manter o nível de habilidade necessário para realizá-los. quando são chamados.
Links com comportamento baseado em habilidade, regras e conhecimento
O elemento final no modelo de Hale e Glendon, que transforma a figura 3 na figura 1, é a adição do link para o trabalho de Reason e Rasmussen. Este trabalho enfatizou que o comportamento pode ser evidenciado em três níveis diferentes de controle consciente - baseado em habilidades, baseado em regras e baseado em conhecimento - que envolvem diferentes aspectos do funcionamento humano e estão sujeitos a diferentes tipos e graus de perturbação ou erro por conta de sinais externos ou falhas internas de processamento.
Baseado em habilidade. O nível baseado em habilidade é altamente confiável, mas sujeito a lapsos e deslizes quando perturbado ou quando outra rotina semelhante captura o controle. Este nível é particularmente relevante para o tipo de comportamento rotineiro que envolve respostas automáticas a sinais conhecidos que indicam perigo, seja iminente ou mais remoto. As respostas são rotinas conhecidas e praticadas, como manter os dedos longe de um rebolo enquanto afia um cinzel, dirigir um carro para mantê-lo na estrada ou abaixar-se para evitar um objeto voador vindo em nossa direção. As respostas são tão automáticas que os trabalhadores podem nem perceber que estão controlando ativamente o perigo com elas.
Baseado em regras. O nível baseado em regras está preocupado em escolher entre uma variedade de rotinas ou regras conhecidas aquela que é apropriada para a situação - por exemplo, escolher qual sequência iniciar para fechar um reator que, de outra forma, ficaria sobrepressurizado, selecionando o correto óculos de segurança para trabalhar com ácidos (ao contrário daqueles para trabalhar com poeiras), ou decidir, como gerente, realizar uma revisão de segurança completa para uma nova fábrica, em vez de uma verificação informal curta. Os erros aqui geralmente estão relacionados ao tempo insuficiente gasto para adequar a escolha à situação real, ao confiar na expectativa em vez da observação para entender a situação ou ao ser enganado por informações externas para fazer um diagnóstico errado. No modelo de Hale e Glendon, o comportamento nesse nível é particularmente relevante para detectar perigos e escolher procedimentos corretos em situações familiares.
Baseado em conhecimento. O nível baseado no conhecimento é empregado apenas quando não existem planos ou procedimentos pré-existentes para lidar com uma situação em desenvolvimento. Isto é particularmente verdadeiro no reconhecimento de novos perigos na fase de projeto, na detecção de problemas insuspeitos durante as inspeções de segurança ou no enfrentamento de emergências imprevistas. Este nível é predominante nas etapas no topo da figura 1. É o modo menos previsível e menos confiável de operação, mas também o modo onde nenhuma máquina ou computador pode substituir um ser humano na detecção de perigo potencial e na recuperação de desvios.
Juntar todos os elementos resulta na figura 1, que fornece uma estrutura para classificar onde ocorreram falhas no comportamento humano em um acidente passado e analisar o que pode ser feito para otimizar o comportamento humano no controle do perigo em uma determinada situação ou tarefa antes de qualquer acidentes.