- Ви сте овде:
-
Početna

-
Садржај (2)
-
Парт КСВИИ. Услуге и трговина
-
Транспортна индустрија и складиштење
- складиштење

Карвовски, Валдемар
Адреса: Центар за индустријску ергономију, Универзитет у Лоуисвиллеу, Лоуисвилле, КИ 402292
Земља: Сједињене Америчке Државе
телефон: КСНУМКС (КСНУМКС) КСНУМКС-КСНУМКС
Факс: КСНУМКС (КСНУМКС) КСНУМКС-КСНУМКС
Е-маил: в0карв03@улкивм.лоуисвилле.еду
Претходне позиције: Фулбрајтов стипендиста, гостујући професор, Технолошки универзитет у Тампереу, Тампере, Финска
Образовање: МС, 1978, Технички универзитет у Вроцлаву, Пољска; Докторат, 1982, индустријско инжењерство/ергономија, Тексашки технолошки универзитет, Лабок
Софтвер и рачунари: хибридни аутоматизовани системи
Хибридни аутоматизовани систем (ХАС) има за циљ да интегрише могућности вештачки интелигентних машина (базираних на рачунарској технологији) са капацитетима људи који са тим машинама ступају у интеракцију у току својих радних активности. Главни проблеми коришћења ХАС-а односе се на то како би људски и машински подсистеми требало да буду дизајнирани да би се на најбољи начин искористили знања и вештине оба дела хибридног система, и како људски оператери и машинске компоненте треба да интерагују једни са другима. да осигурају да се њихове функције допуњују. Многи хибридни аутоматизовани системи су еволуирали као производи примене савремених методологија заснованих на информацијама и контроли за аутоматизацију и интегрисање различитих функција често сложених технолошких система. ХАС је првобитно идентификован са увођењем компјутерски заснованих система који се користе у пројектовању и раду система контроле у реалном времену за нуклеарне енергетске реакторе, за постројења за хемијску прераду и за технологију производње дискретних делова. ХАС се сада такође може наћи у многим услужним индустријама, као што су контрола ваздушног саобраћаја и процедуре за навигацију авиона у области цивилног ваздухопловства, као и у дизајну и употреби интелигентних система за навигацију возила и аутопутева у друмском саобраћају.
Са континуираним напретком у аутоматизацији заснованој на компјутерима, природа људских задатака у савременим технолошким системима се помера са оних који захтевају перцептивно-моторичке вештине на оне који захтевају когнитивне активности, које су потребне за решавање проблема, за доношење одлука у праћењу система и за послове надзорне контроле. На пример, људски оператери у компјутерски интегрисаним производним системима првенствено делују као системски монитори, решавачи проблема и доносиоци одлука. Когнитивне активности људског супервизора у било ком ХАС окружењу су (1) планирање шта треба да се уради за одређени временски период, (2) осмишљавање процедура (или корака) за постизање скупа планираних циљева, (3) праћење напретка (технолошких) процеса, (4) „подучавање“ система преко рачунара са интеракцијом са људима, (5) интервенисање ако се систем понаша ненормално или ако се промене приоритети контроле и (6) учење путем повратних информација из система о утицају надзорне радње (Шеридан 1987).
Дизајн хибридног система
Интеракције човек-машина у ХАС-у укључују коришћење динамичких комуникацијских петљи између људских оператера и интелигентних машина — процес који укључује детекцију и обраду информација и иницирање и извршење контролних задатака и доношење одлука — у оквиру дате структуре алокације функција између људи и машине. У најмању руку, интеракције између људи и аутоматизације треба да одражавају високу сложеност хибридних аутоматизованих система, као и релевантне карактеристике људских оператера и захтеве задатака. Стога се хибридни аутоматизовани систем може формално дефинисати као петоструки у следећој формули:
ХАС = (Т, У, Ц, Е, И)
где T = захтеви задатка (физички и когнитивни); U = карактеристике корисника (физичке и когнитивне); C = карактеристике аутоматизације (хардвер и софтвер, укључујући рачунарске интерфејсе); E = окружење система; I = скуп интеракција између горе наведених елемената.
Скуп интеракција I оличава све могуће интеракције између T, U C in E без обзира на њихову природу или снагу удруживања. На пример, једна од могућих интеракција може укључивати однос података ускладиштених у меморији рачунара са одговарајућим знањем, ако га има, људског оператера. Интеракције I могу бити елементарне (тј. ограничене на асоцијацију један на један) или сложене, као што би укључивале интеракције између људског оператера, одређеног софтвера који се користи за постизање жељеног задатка и доступног физичког интерфејса са рачунаром.
Дизајнери многих хибридних аутоматизованих система фокусирају се првенствено на компјутерски потпомогнуту интеграцију софистицираних машина и друге опреме као делова компјутерски засноване технологије, ретко обраћајући велику пажњу на превасходну потребу за ефикасном људском интеграцијом унутар таквих система. Стога, у овом тренутку, многи компјутерски интегрисани (технолошки) системи нису у потпуности компатибилни са инхерентним способностима људских оператера као што је изражено вештинама и знањем неопходним за ефикасну контролу и праћење ових система. Таква некомпатибилност настаје на свим нивоима људског, машинског и човек-машинског функционисања и може се дефинисати у оквиру појединца и целе организације или објекта. На пример, проблеми интеграције људи и технологије у напредна производна предузећа јављају се у раној фази пројектовања ХАС-а. Ови проблеми се могу концептуализовати коришћењем следећег модела системске интеграције комплексности интеракција, I, између дизајнера система, D, људски оператери, Hили потенцијални корисници система и технологија, T:
ја (Х, Т) = Ф [ И (Х, Д), И (Д, Т)]
где I означава релевантне интеракције које се одвијају у датој структури ХАС-а, док F указује на функционалне односе између дизајнера, људских оператера и технологије.
Горе наведени модел интеграције система наглашава чињеницу да су интеракције између корисника и технологије одређене исходом интеграције две раније интеракције – наиме, (1) оне између ХАС дизајнера и потенцијалних корисника и (2) оне између дизајнера. и ХАС технологија (на нивоу машина и њихове интеграције). Треба напоменути да иако типично постоје јаке интеракције између дизајнера и технологије, може се наћи само неколико примера једнако јаких међусобних односа између дизајнера и људских оператера.
Може се тврдити да чак иу најаутоматизованијим системима, људска улога остаје кључна за успешан рад система на оперативном нивоу. Баинбридге (1983) је идентификовао скуп проблема релевантних за рад ХАС-а који су последица природе саме аутоматизације, као што следи:
- Оператори „изван контролне петље“. Људски оператери су присутни у систему да врше контролу када је то потребно, али тиме што су „изван контролне петље“ не успевају да задрже мануелне вештине и дугорочно знање о систему који су често потребни у случају нужде.
- Застарела „ментална слика“. Људски оператери можда неће моћи брзо да реагују на промене у понашању система ако нису пажљиво пратили догађаје његовог рада. Штавише, знање оператера или ментална слика о функционисању система могу бити неадекватни за иницирање или упражњавање потребних одговора.
- Нестају генерације вештина. Нови оператери можда неће моћи да стекну довољно знања о компјутеризованом систему стеченог кроз искуство и стога неће моћи да врше ефективну контролу када је то потребно.
- Ауторитет аутоматике. Ако је компјутеризовани систем имплементиран зато што може да обавља тражене задатке боље од људског оператера, поставља се питање „На основу чега оператер треба да одлучи да аутоматизовани системи доносе исправне или нетачне одлуке?“
- Појава нових врста „људских грешака” услед аутоматизације. Аутоматизовани системи доводе до нових врста грешака и, последично, незгода које се не могу анализирати у оквиру традиционалних техника анализе.
Алокација задатака
Једно од важних питања за ХАС дизајн је да се одреди колико и које функције или одговорности треба доделити људским оператерима, а које и колико компјутерима. Генерално, постоје три основне класе проблема алокације задатака које треба узети у обзир: (1) алокација задатака човек-супервизор-рачунар, (2) алокација задатака човек-људи и (3) алокација задатака надзорни рачунар-рачунар. У идеалном случају, одлуке о алокацији треба да се доносе кроз неку структурирану процедуру алокације пре него што се започне дизајн основног система. Нажалост, такав систематски процес је ретко могућ, јер функције које ће се доделити могу или захтевати даље испитивање или се морају спровести интерактивно између компоненти људског и машинског система – то јест, применом парадигме надзорне контроле. Алокација задатака у хибридним аутоматизованим системима треба да се фокусира на обим људских и компјутерских надзорних одговорности и треба да узме у обзир природу интеракције између људског оператера и компјутеризованих система за подршку одлучивању. Такође треба узети у обзир средства за пренос информација између машина и интерфејса за унос-излаз људи и компатибилност софтвера са људским когнитивним способностима решавања проблема.
У традиционалним приступима дизајну и управљању хибридним аутоматизованим системима, радници су сматрани детерминистичким улазно-излазним системима и постојала је тенденција да се занемари телеолошка природа људског понашања – то јест, понашање усмерено ка циљу које се ослања на стицање релевантне информације и избор циљева (Гоодстеин ет ал. 1988). Да би био успешан, дизајн и управљање напредним хибридним аутоматизованим системима морају бити засновани на опису људских менталних функција потребних за одређени задатак. Приступ „когнитивног инжењеринга“ (описан даље у наставку) предлаже да системи човек-машина (хибридни) треба да буду осмишљени, пројектовани, анализирани и процењени у смислу људских менталних процеса (тј., ментални модел оператера адаптивних система се узима у обзир рачун). Следећи су захтеви приступа пројектовању и раду ХАС-а усмереног на човека како их је формулисао Цорбетт (1988):
- Компатибилност. Рад система не би требало да захтева вештине које нису повезане са постојећим вештинама, али би требало да омогући развој постојећих вештина. Људски оператер треба да унесе и прими информације које су компатибилне са конвенционалном праксом како би интерфејс био у складу са претходним знањем и вештином корисника.
- провидност. Не може се контролисати систем без разумевања. Због тога, људски оператер мора бити у стању да „види“ унутрашње процесе контролног софтвера система да би учење било олакшано. Транспарентни систем олакшава корисницима да изграде интерни модел функција одлучивања и контроле које систем може да обавља.
- Минимални шок. Систем не би требало да ради ништа што оператери сматрају неочекиваним у светлу информација које су им доступне, са детаљима о тренутном стању система.
- Контрола поремећаја. Неизвесни задаци (као што је дефинисано анализом структуре избора) треба да буду под контролом човека оператера уз компјутерску подршку за доношење одлука.
- Погрешивост. Имплицитне вештине и знања људских оператера не би требало да буду дизајниране ван система. Оператери никада не би требало да буду доведени у позицију да беспомоћно гледају како софтвер усмерава погрешну операцију.
- Реверзибилност грешке. Софтвер би требало да обезбеди довољно информација за пренос информација како би обавестио човека-оператера о вероватним последицама одређене операције или стратегије.
- Оперативна флексибилност. Систем треба да понуди људским оператерима слободу избора захтева и ограничења ресурса мењањем оперативних стратегија без губљења подршке софтвера за контролу.
Инжењеринг когнитивних људских фактора
Инжењеринг когнитивних људских фактора се фокусира на то како људски оператери доносе одлуке на радном месту, решавају проблеме, формулишу планове и уче нове вештине (Холлнагел и Воодс 1983). Улоге људских оператера који функционишу у било којој ХАС могу се класификовати коришћењем Расмусенове шеме (1983) у три главне категорије:
- Понашање засновано на вештинама је сензорно-моторичка изведба која се изводи током радњи или активности које се одвијају без свесне контроле као глатки, аутоматизовани и високо интегрисани обрасци понашања. Људске активности које спадају у ову категорију сматрају се низом вештих радњи састављених за дату ситуацију. Понашање засновано на вештини је стога израз мање или више сачуваних образаца понашања или унапред програмираних инструкција у просторно-временском домену.
- Понашање засновано на правилима је циљно оријентисана категорија перформанси структурисана контролом унапред преко ускладиштеног правила или процедуре—то јест, уређена изведба која омогућава састављање низа потпрограма у познатој радној ситуацији. Правило се обично бира из претходних искустава и одражава функционална својства која ограничавају понашање околине. Учинак заснован на правилима је заснован на експлицитном знању у погледу примене релевантних правила. Скуп података о одлуци састоји се од референци за препознавање и идентификацију стања, догађаја или ситуација.
- Понашање засновано на знању је категорија циљано контролисане перформансе, у којој је циљ експлицитно формулисан на основу познавања околине и циљева особе. Унутрашња структура система представљена је „менталним моделом“. Овакво понашање омогућава развој и тестирање различитих планова под непознатим и, према томе, неизвесним контролним условима, и потребно је када су вештине или правила или недоступни или неадекватни, тако да се уместо тога мора тражити решавање проблема и планирање.
У дизајну и управљању ХАС-ом треба узети у обзир когнитивне карактеристике радника како би се осигурала компатибилност рада система са интерним моделом радника који описује његове функције. Сходно томе, ниво описа система треба да се помери са аспекта људског функционисања заснованог на вештинама на аспекте засноване на правилима и знању, а одговарајуће методе когнитивне анализе задатака треба користити за идентификацију оператеровог модела система. Повезано питање у развоју ХАС-а је дизајн средстава за пренос информација између људског оператера и компоненти аутоматизованог система, како на физичком тако и на когнитивном нивоу. Такав пренос информација треба да буде компатибилан са начинима информација који се користе на различитим нивоима рада система—то јест, визуелни, вербални, тактилни или хибридни. Ова информациона компатибилност осигурава да ће различити облици преноса информација захтевати минималну некомпатибилност између медија и природе информација. На пример, визуелни приказ је најбољи за пренос просторних информација, док се звучни унос може користити за преношење текстуалних информација.
Често људски оператер развија интерни модел који описује рад и функцију система према његовом или њеном искуству, обуци и упутствима у вези са датим типом интерфејса човек-машина. У светлу ове реалности, дизајнери ХАС-а треба да покушају да у машине (или друге вештачке системе) уграде модел физичких и когнитивних карактеристика људског оператера – то јест, слику система о оператеру (Холлнагел и Воодс 1983) . Дизајнери ХАС-а такође морају узети у обзир ниво апстракције у опису система, као и различите релевантне категорије понашања људског оператера. Ови нивои апстракције за моделирање људског функционисања у радном окружењу су следећи (Расмуссен 1983): (1) физички облик (анатомска структура), (2) физичке функције (физиолошке функције), (3) генерализоване функције (психолошки механизми и когнитивни и афективни процеси), (4) апстрактне функције (обрада информација) и (5) функционална сврха (вредносне структуре, митови, религије, људске интеракције). Ових пет нивоа пројектанти морају истовремено размотрити како би се обезбедиле ефективне перформансе ХАС-а.
Дизајн системског софтвера
Пошто је рачунарски софтвер примарна компонента сваког ХАС окружења, развој софтвера, укључујући дизајн, тестирање, рад и модификацију, као и питања поузданости софтвера такође се морају размотрити у раним фазама развоја ХАС-а. На овај начин, требало би да буде у стању да смањи трошкове откривања и елиминације софтверских грешака. Тешко је, међутим, проценити поузданост људских компоненти ХАС-а, због ограничења у нашој способности да моделирамо перформансе људских задатака, повезаног радног оптерећења и потенцијалних грешака. Превелико или недовољно ментално оптерећење може довести до преоптерећења информацијама и досаде, и може довести до погоршања људских перформанси, што доводи до грешака и све веће вероватноће незгода. Дизајнери ХАС-а треба да користе адаптивне интерфејсе, који користе технике вештачке интелигенције, да би решили ове проблеме. Поред компатибилности човек-машина, мора се размотрити и питање међусобног прилагођавања човека и машине како би се смањио ниво стреса који настаје када се људске способности могу прекорачити.
Због високог нивоа сложености многих хибридних аутоматизованих система, идентификација било које потенцијалне опасности у вези са хардвером, софтвером, оперативним процедурама и интеракцијама људи и машина ових система постаје критична за успех напора усмерених на смањење повреда и оштећења опреме. . Безбедносни и здравствени ризици повезани са сложеним хибридним аутоматизованим системима, као што је компјутерски интегрисана производна технологија (ЦИМ), очигледно је један од најкритичнијих аспеката дизајна и рада система.
Проблеми безбедности система
Хибридна аутоматизована окружења, са својим значајним потенцијалом за погрешно понашање контролног софтвера у условима поремећаја система, стварају нову генерацију ризика од незгода. Како хибридни аутоматизовани системи постају свестранији и сложенији, поремећаји у систему, укључујући проблеме при покретању и искључивању и одступања у контроли система, могу значајно повећати могућност озбиљне опасности за људске оператере. Иронично, у многим ненормалним ситуацијама, оператери се обично ослањају на правилно функционисање аутоматизованих безбедносних подсистема, што је пракса која може повећати ризик од тешких повреда. На пример, студија незгода повезаних са кваровима система техничке контроле је показала да је око једне трећине секвенци незгода укључивало људску интервенцију у контролној петљи поремећеног система.
Пошто се традиционалне мере безбедности не могу лако прилагодити потребама ХАС окружења, стратегије контроле повреда и превенције несрећа морају се преиспитати с обзиром на инхерентне карактеристике ових система. На пример, у области напредне производне технологије, многе процесе карактерише постојање значајних количина енергетских токова које људски оператери не могу лако предвидети. Штавише, безбедносни проблеми се обично појављују на интерфејсима између подсистема, или када системски поремећаји напредују од једног до другог подсистема. Према Међународној организацији за стандардизацију (ИСО 1991), ризици повезани са опасностима услед индустријске аутоматизације варирају у зависности од типова индустријских машина уграђених у одређени производни систем и од начина на који је систем инсталиран, програмиран, управљан, одржаван. и поправљено. На пример, поређење несрећа повезаних са роботима у Шведској са другим врстама незгода показало је да роботи могу бити најопасније индустријске машине које се користе у напредној производној индустрији. Процењена стопа незгода за индустријске роботе била је једна тешка несрећа на 45 робот-година, виша стопа од оне за индустријске пресе, за коју је пријављено да је једна незгода на 50 машинских година. Овде треба напоменути да су индустријске пресе у Сједињеним Државама чиниле око 23% свих смртних случајева у вези са машинама за обраду метала у периоду од 1980. до 1985. године, са електричним пресама које су биле на првом месту у погледу производа по озбиљности и учесталости повреда које нису фаталне.
У домену напредне производне технологије, постоји много покретних делова који су опасни за раднике јер на сложен начин мењају свој положај ван видног поља људских оператера. Брзи технолошки развој у компјутерски интегрисаној производњи створио је критичну потребу за проучавањем ефеката напредне производне технологије на раднике. Да би се идентификовале опасности које изазивају различите компоненте таквог ХАС окружења, потребно је пажљиво анализирати прошле несреће. Нажалост, несреће које укључују употребу робота тешко је изоловати из извештаја о несрећама у вези са машинама које управљају људи, и стога може постојати висок проценат незабележених незгода. Правила о здрављу и безбедности на раду у Јапану наводе да „индустријски роботи тренутно немају поуздана средства безбедности и радници не могу бити заштићени од њих осим ако њихова употреба није регулисана”. На пример, резултати истраживања које је спровело Министарство рада Јапана (Сугимото 1987) о несрећама у вези са индустријским роботима у 190 испитаних фабрика (са 4,341 радним роботом) показали су да је било 300 поремећаја повезаних са роботима, од чега 37 случајева небезбедних радњи су довеле до неких блиских несрећа, 9 су биле незгоде са повредама, а 2 су биле несреће са смртним исходом. Резултати других студија показују да аутоматизација заснована на рачунару не повећава нужно укупан ниво безбедности, јер системски хардвер не може да се учини безбедним само помоћу безбедносних функција у софтверу рачунара, а системски контролери нису увек високо поуздани. Штавише, у сложеном ХАС-у, не може се ослањати искључиво на безбедносне сензорске уређаје за откривање опасних услова и предузимање одговарајућих стратегија за избегавање опасности.
Ефекти аутоматизације на људско здравље
Као што је горе објашњено, радничке активности у многим ХАС окружењима су у основи оне надзорне контроле, надгледања, подршке система и одржавања. Ове активности се такође могу класификовати у четири основне групе и то: (1) програмски задаци, тј. кодирање информација које воде и усмеравају рад машине, (2) праћење производних и контролних компоненти ХАС-а, (3) одржавање компоненти ХАС-а ради спречавања или ублажавање кварова на машинама и (4) обављање различитих задатака подршке итд. Многи недавни прегледи утицаја ХАС-а на добробит радника закључили су да иако коришћење ХАС-а у области производње може елиминисати тешке и опасне задатке , рад у ХАС окружењу може бити незадовољан и стресан за раднике. Извори стреса су укључивали стално праћење потребно у многим ХАС апликацијама, ограничен обим додељених активности, низак ниво интеракције радника који је дозвољен дизајном система и безбедносне опасности повезане са непредвидивом и неконтролисаном природом опреме. Иако неки радници који су укључени у активности програмирања и одржавања осећају елементе изазова, који могу имати позитивне ефекте на њихово благостање, ови ефекти се често надокнађују сложеном и захтевном природом ових активности, као и притиском које је извршио менаџмент да брзо заврши ове активности.
Иако су у неким ХАС окружењима људски оператери уклоњени из традиционалних извора енергије (ток рада и кретање машине) током нормалних радних услова, многи задаци у аутоматизованим системима и даље треба да се обављају у директном контакту са другим изворима енергије. С обзиром да се број различитих компоненти ХАС-а стално повећава, посебан нагласак мора бити стављен на удобност и сигурност радника и на развој дјелотворних одредби за контролу повреда, посебно имајући у виду чињеницу да радници више нису у стању да држе корак са софистицираност и сложеност оваквих система.
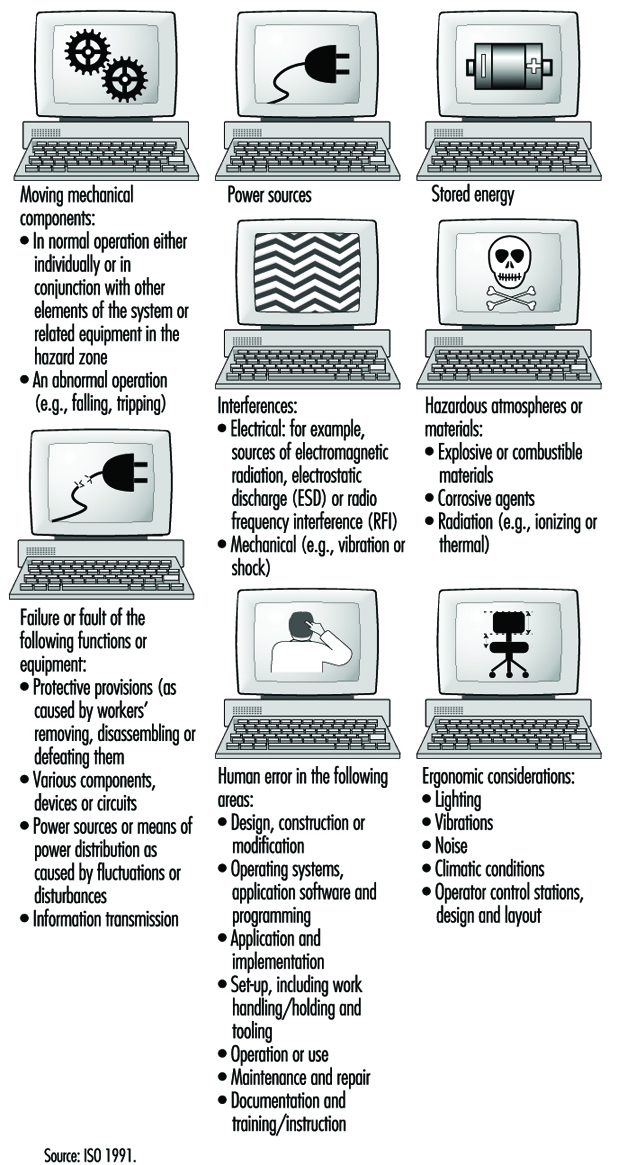
Да би се задовољиле тренутне потребе за контролом повреда и безбедношћу радника у компјутерски интегрисаним производним системима, ИСО комитет за индустријске аутоматизоване системе је предложио нови безбедносни стандард под називом „Безбедност интегрисаних производних система“ (1991). Овај нови међународни стандард, који је развијен у знак препознавања посебних опасности које постоје у интегрисаним производним системима који укључују индустријске машине и припадајућу опрему, има за циљ да минимизира могућности повреда особља током рада на или у близини интегрисаног производног система. Главни извори потенцијалних опасности за људске оператере у ЦИМ-у идентификовани овим стандардом су приказани на слици 1.
Слика 1. Главни извор опасности у компјутерски интегрисаној производњи (ЦИМ) (после ИСО 1991)
Људске и системске грешке
Генерално, опасности у ХАС-у могу настати из самог система, из његове повезаности са другом опремом присутном у физичком окружењу, или из интеракције људског особља са системом. Несрећа је само један од неколико исхода интеракција људи и машина који могу настати у опасним условима; несреће у близини и инциденти са оштећењем су много чешћи (Зимолонг и Дуда 1992). Појава грешке може довести до једне од ових последица: (1) грешка остаје непримећена, (2) систем може да надокнади грешку, (3) грешка доводи до квара машине и/или заустављања система или (4) ) грешка доводи до несреће.
Пошто свака људска грешка која резултира критичним инцидентом неће изазвати стварну несрећу, прикладно је даље разликовати категорије исхода на следећи начин: (1) небезбедан инцидент (тј. било која ненамерна појава без обзира да ли је резултирала повредом, штетом или губитак), (2) несрећа (тј. небезбедан догађај који је резултирао повредом, штетом или губитком), (3) инцидент са штетом (тј. небезбедни догађај који резултира само неком врстом материјалне штете), (4) а блиска несрећа или „скора промашај“ (тј. небезбедан догађај у којем је повреда, штета или губитак случајно избегнут уз малу маргину) и (5) постојање потенцијалне незгоде (тј. небезбедни догађаји који су могли да доведу до повреде, штете , или губитак, али, стицајем околности, није резултирао чак ни близу несреће).
У ХАС-у се могу разликовати три основна типа људске грешке:
- омашке и пропусте засноване на вештини
- грешке засноване на правилима
- грешке засноване на знању.
Ова таксономија, коју је осмислио Реасон (1990), заснива се на модификацији Расмусенове класификације људских перформанси вештина-правило-знање као што је горе описано. На нивоу вештина, људски учинак је вођен сачуваним обрасцима унапред програмираних инструкција представљених као аналогне структуре у просторно-временском домену. Ниво заснован на правилима је применљив на решавање познатих проблема у којима су решења вођена ускладиштеним правилима (која се називају „производње“, пошто им се приступа или их производи по потреби). Ова правила захтевају одређене дијагнозе (или процене) или предузимање одређених корективних радњи, с обзиром на то да су се појавили одређени услови који захтевају одговарајући одговор. На овом нивоу, људске грешке су типично повезане са погрешном класификацијом ситуација, што доводи или до примене погрешног правила или до погрешног опозива последичних пресуда или поступака. Грешке засноване на знању јављају се у новим ситуацијама за које се акције морају планирати „он-лине“ (у датом тренутку), користећи свесне аналитичке процесе и ускладиштено знање. Грешке на овом нивоу произилазе из ограничења ресурса и непотпуног или нетачног знања.
Генерички системи за моделирање грешака (ГЕМС) које је предложио Реасон (1990), који покушавају да лоцирају порекло основних типова људских грешака, могу се користити за извођење укупне таксономије људског понашања у ХАС-у. ГЕМС настоји да интегрише две различите области истраживања грешака: (1) пропусте и пропусте, у којима акције одступају од тренутне намере због неуспеха у извршењу и/или грешака у складиштењу и (2) грешке, у којима радње могу да се одвијају према плану, али план је неадекватан за постизање жељеног исхода.
Процена и превенција ризика у ЦИМ
Према ИСО (1991), процена ризика у ЦИМ-у треба да се врши тако да се сви ризици сведу на минимум и да служи као основа за одређивање безбедносних циљева и мера у развоју програма или планова како за стварање безбедног радног окружења тако и за обезбеђивање безбедност и здравље особља такође. На пример, опасности на раду у ХАС окружењима заснованим на производњи могу се окарактерисати на следећи начин: (1) људски оператер ће можда морати да уђе у опасну зону током задатака опоравка од поремећаја, сервисирања и одржавања, (2) опасну зону је тешко одредити, да опажа и контролише, (3) рад може бити монотон и (4) незгоде које се дешавају у компјутерски интегрисаним производним системима често су озбиљне. Свака идентификована опасност треба да буде процењена у односу на њен ризик, а одговарајуће мере безбедности треба да буду одређене и спроведене како би се тај ризик минимизирао. Опасности такође треба утврдити у погледу свих следећих аспеката било ког процеса: сама јединица; интеракција између појединачних јединица; оперативни делови система; и рад комплетног система за све предвиђене режиме рада и услове, укључујући услове под којима су нормална заштитна средства суспендована за такве операције као што су програмирање, верификација, решавање проблема, одржавање или поправка.
Фаза пројектовања ИСО (1991) безбедносне стратегије за ЦИМ укључује:
- спецификација граница параметара система
- примена стратегије безбедности
- идентификација опасности
- процена повезаних ризика
- отклањање опасности или смањење ризика колико је то изводљиво.
Сигурносна спецификација система треба да садржи:
- опис функција система
- распоред и/или модел система
- резултати анкете предузете да би се истражила интеракција различитих радних процеса и ручних активности
- анализа секвенци процеса, укључујући ручну интеракцију
- опис интерфејса са транспортером или транспортним линијама
- дијаграми тока процеса
- фондацијски планови
- планови уређаја за снабдевање и одлагање
- одређивање простора потребног за набавку и одлагање материјала
- доступне евиденције незгода.
У складу са ИСО (1991), сви неопходни захтеви за обезбеђивање безбедног рада ЦИМ система морају се узети у обзир при пројектовању процедура систематског планирања безбедности. Ово укључује све заштитне мере за ефикасно смањење опасности и захтева:
- интеграцију интерфејса човек-машина
- рано дефинисање положаја оних који раде у систему (у времену и простору)
- рано разматрање начина смањења изолованог рада
- разматрање еколошких аспеката.
Процедура сигурносног планирања треба да се бави, између осталог, следећим безбедносним питањима ЦИМ-а:
- Избор режима рада система. Контролна опрема треба да има одредбе за најмање следеће режиме рада: (1) нормалан или производни режим (тј. са свим нормалним заштитним елементима који су повезани и раде), (2) рад са суспендованим неким од нормалних заштитних механизама и (3) рад у који систем или даљинско ручно покретање опасних ситуација је спречено (нпр. у случају локалног рада или изолације напајања или механичке блокаде опасних услова).
- Обука, инсталација, пуштање у рад и функционално тестирање. Када се захтева да особље буде у зони опасности, у контролном систему треба обезбедити следеће мере безбедности: (1) задржавање ради рада, (2) уређај за омогућавање, (3) смањена брзина, (4) смањена снага и (5) ) покретно заустављање у нужди.
- Сигурност у програмирању, одржавању и поправци система. Током програмирања, само програмер треба да буде у заштићеном простору. Систем треба да има процедуре за инспекцију и одржавање како би се обезбедио наставак планираног рада система. Програм инспекције и одржавања треба да узме у обзир препоруке добављача система и препоруке добављача различитих елемената система. Једва да треба помињати да особље које обавља одржавање или поправке система треба да буде обучено у поступцима неопходним за обављање тражених задатака.
- Отклањање грешке. Тамо где је отклањање квара неопходно из унутрашњости заштићеног простора, то треба извршити након безбедног искључивања (или, ако је могуће, након што је активиран механизам за закључавање). Треба предузети додатне мере против погрешног покретања опасних ситуација. Тамо где се могу појавити опасности током отклањања кварова на деловима система или на машинама суседних система или машина, оне такође треба да буду искључене из рада и заштићене од неочекиваног покретања. Путем упутстава и знакова упозорења треба скренути пажњу на отклањање кварова у компонентама система који се не могу у потпуности уочити.
Контрола поремећаја система
У многим ХАС инсталацијама које се користе у компјутерски интегрисаној производној области, људски оператери су обично потребни у сврху контроле, програмирања, одржавања, претходног подешавања, сервисирања или решавања проблема. Поремећаји у систему доводе до ситуација због којих је неопходно да радници уђу у опасна подручја. У том смислу, може се претпоставити да поремећаји остају најважнији разлог за мешање људи у ЦИМ, јер ће системи најчешће бити програмирани изван ограничених подручја. Једно од најважнијих питања за безбедност ЦИМ-а је спречавање сметњи, пошто се већина ризика јавља у фази решавања проблема у систему. Избегавање сметњи је заједнички циљ у погледу безбедности и економичности.
Поремећај у ЦИМ систему је стање или функција система која одступа од планираног или жељеног стања. Поред продуктивности, поремећаји током рада ЦИМ-а директно утичу на безбедност људи укључених у рад система. Финска студија (Куиванен 1990) показала је да отприлике половина поремећаја у аутоматизованој производњи смањује безбедност радника. Главни узроци поремећаја били су грешке у дизајну система (34%), кварови компоненти система (31%), људска грешка (20%) и спољни фактори (15%). Већина кварова на машинама била је узрокована контролним системом, ау контролном систему већина кварова се догодила у сензорима. Ефикасан начин да се повећа ниво безбедности ЦИМ инсталација је смањење броја сметњи. Иако људска дејства у поремећеним системима спречавају настанак удеса у ХАС окружењу, она им такође доприносе. На пример, студија незгода повезаних са кваровима система техничке контроле је показала да је око једне трећине секвенци незгода укључивало људску интервенцију у контролној петљи поремећеног система.
Главна истраживачка питања у превенцији ЦИМ поремећаја тичу се (1) главних узрока сметњи, (2) непоузданих компоненти и функција, (3) утицаја поремећаја на безбедност, (4) утицаја поремећаја на функцију система, ( 5) материјална штета и (6) поправке. Безбедност ХАС-а треба да се планира рано у фази пројектовања система, уз дужно разматрање технологије, људи и организације, и да буде саставни део целокупног процеса техничког планирања ХАС-а.
ХАС Дизајн: будући изазови
Да би се обезбедила потпуна корист од хибридних аутоматизованих система, као што је горе дискутовано, потребна је много шира визија развоја система, она која се заснива на интеграцији људи, организације и технологије. Овде треба применити три главна типа системске интеграције:
- интеграција људи, обезбеђујући ефикасну комуникацију између њих
- интеграцију човека и рачунара, пројектовањем одговарајућих интерфејса и интеракције између људи и рачунара
- технолошка интеграција, обезбеђивањем ефикасног повезивања и интеракције између машина.
Минимални захтеви дизајна за хибридне аутоматизоване системе треба да обухватају следеће: (1) флексибилност, (2) динамичку адаптацију, (3) побољшану реакцију и (4) потребу да се мотивишу људи и боље искористе њихове вештине, расуђивање и искуство . Горе наведено такође захтева да се ХАС организационе структуре, радне праксе и технологије развију како би се омогућило људима на свим нивоима система да прилагоде своје радне стратегије различитим ситуацијама контроле система. Стога ће организације, радна пракса и технологије ХАС-а морати да буду дизајниране и развијене као отворени системи (Кидд 1994).
Отворени хибридни аутоматизовани систем (ОХАС) је систем који прима улазне податке и шаље излазе у своје окружење. Идеја отвореног система може се применити не само на системске архитектуре и организационе структуре, већ и на радну праксу, интерфејсе човека и рачунара и односе између људи и технологија: могу се поменути, на пример, системи планирања, контролни системи и системи за подршку одлучивању. Отворени систем је такође прилагодљив када људима омогућава велики степен слободе да дефинишу начин рада система. На пример, у области напредне производње, захтеви отвореног хибридног аутоматизованог система могу се реализовати кроз концепт људска и компјутерски интегрисана производња (ХЦИМ). Са овог становишта, дизајн технологије треба да се бави целокупном архитектуром ХЦИМ система, укључујући следеће: (1) разматрања мреже група, (2) структуру сваке групе, (3) интеракцију између група, (4) природу пратећег софтвера и (5) техничку комуникацију и потребе интеграције између пратећих софтверских модула.
Адаптивни хибридни аутоматизовани систем, за разлику од затвореног система, не ограничава оно што људи могу да раде. Улога дизајнера ХАС-а је да креира систем који ће задовољити личне преференције корисника и омогућити корисницима да раде на начин који сматрају најприкладнијим. Предуслов за омогућавање корисничког уноса је развој методологије адаптивног дизајна—то јест, ОХАС-а који омогућава омогућавање компјутерски подржане технологије за њену примену у процесу пројектовања. Потреба за развојем методологије за адаптивни дизајн је један од непосредних захтева за реализацију ОХАС концепта у пракси. Такође треба развити нови ниво адаптивне технологије управљања људским надзором. Таква технологија би требало да омогући људском оператеру да „прогледа кроз“ иначе невидљив контролни систем функционисања ХАС-а—на пример, применом интерактивног, брзог видео система у свакој тачки контроле и рада система. Коначно, веома је потребна методологија за развој интелигентне и високо прилагодљиве, компјутерски засноване подршке људским улогама и људском функционисању у хибридним аутоматизованим системима.
" ОДРИЦАЊЕ ОД ОДГОВОРНОСТИ: МОР не преузима одговорност за садржај представљен на овом веб порталу који је представљен на било ком другом језику осим енглеског, који је језик који се користи за почетну производњу и рецензију оригиналног садржаја. Одређене статистике нису ажуриране од продукција 4. издања Енциклопедије (1998).“