本文討論了因接觸機器運動部件而導致事故的情況和事件鏈。 操作和維護機器的人冒著捲入嚴重事故的風險。 美國統計數據表明,美國每年有 18,000 例截肢和 800 多例死亡可歸因於此類原因。 根據美國國家職業安全與健康研究所 (NIOSH) 的數據,在 1979 年最重要的職業傷害類別中,“夾在裡面、下面或中間”類別的傷害排名最高。此類傷害通常涉及機器 (埃瑟頓和邁爾斯 1990 年)。 自 10 年該類別被引入瑞典職業傷害統計以來,“接觸移動的機器部件”已被報告為略高於 1979% 的職業事故的主要傷害事件。
大多數機器都有可能造成傷害的運動部件。 在對材料進行工作的操作點可能會發現此類移動部件,例如進行切割、成型、鑽孔或變形的位置。 它們可能存在於將能量傳輸到執行工作的機器部件的設備中,例如飛輪、皮帶輪、連桿、聯軸器、凸輪、主軸、鏈條、曲柄和齒輪。 它們可能存在於機器的其他運動部件中,例如移動設備上的輪子、齒輪馬達、泵、壓縮機等。 危險的機器運動也存在於其他類型的機械中,特別是在處理和運輸工件、材料、廢物或工具等負載的設備的輔助部件中。
機器在工作過程中移動的所有部件都可能導致事故,造成傷害和損壞。 旋轉和線性機器運動及其動力來源都可能是危險的:
旋轉運動。 即使是光滑的旋轉軸也會夾住一件衣服,例如,將人的手臂拉到危險的位置。 如果旋轉軸有突出部分或不平整或鋒利的表面,例如調節螺釘、螺栓、狹縫、槽口或切削刃,則危險會增加。 旋轉的機器零件以三種不同的方式產生“咬合點”:
- 在兩個旋轉部件之間有一些點,它們以相反的方向旋轉並且具有平行的軸,例如齒輪或嵌齒輪,托架輥或軋機。
- 旋轉部件與直線運動部件之間存在接觸點,例如傳動帶與其滑輪、鏈條與鏈輪或齒條與小齒輪之間的接觸點。
- 旋轉的機器運動在靠近靜止物體時會產生割傷和擠壓傷的風險——這種情況存在於蜗杆輸送機與其外殼之間、輪輻與機床床身之間,或者在砂輪和工具夾具之間。
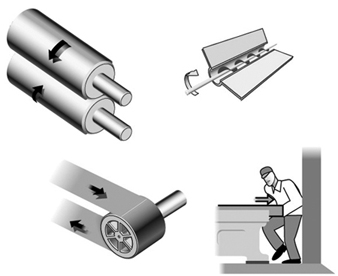
直線運動. 垂直、水平和往復運動可能會以多種方式造成傷害:人可能會受到機器部件的推擠或打擊,並可能被機器部件和其他物體夾住,或者可能被鋒利的邊緣割傷,或受到傷害由於被夾在移動部件和另一個物體之間而造成的咬傷(圖 1)。
圖 1. 可能傷人的機械運動示例
電源。 通常,使用外部電源來運行可能涉及大量能量的機器。 其中包括電力、蒸汽、液壓、氣動和機械動力系統,所有這些系統如果被釋放或不受控制,都可能導致嚴重傷害或損壞。 對印度北部 1987 個村莊的農民一年多來(1988 年至 5.1 年)發生的事故的研究表明,飼料切割機在其他方面都具有相同的設計,但在由電動機或拖拉機驅動時更危險。 涉及超過輕傷(每台機器)的事故的相對頻率對於手動切割機為 8.6‰,對於電動切割機為 1992‰(Mohan 和 Patel XNUMX)。
與機器運動相關的傷害
由於與機器運動相關的力通常非常大,因此可以推測它們造成的傷害會很嚴重。 這一假設得到了多個消息來源的證實。 根據英國統計數據(HSE 5),“接觸移動的機器或正在加工的材料”僅佔所有職業事故的 10%,但在致命和重大事故(骨折、截肢等)中卻佔 1989%。 對瑞典兩個汽車製造廠的研究指向同一個方向。 與非機器相關事故相比,以中值衡量,由機器運動引起的事故導致病假天數增加一倍。 機器相關事故在身體部位受傷方面也不同於其他事故:結果表明,“機器”事故中 80% 的傷害是手和手指,而“其他”事故中相應的比例是40%(Backström 和 Döös 1995)。
事實證明,自動化裝置的風險情況既不同(在事故類型、事件順序和傷害嚴重程度方面)也比在自動化裝置中更複雜(在技術術語和專業技能需求方面)使用傳統機械的裝置。 期限 自動化 “機械”在本文中指的是無需人的直接干預即可啟動機器運動或改變其方向或功能的設備。 此類設備需要傳感器設備(例如,位置傳感器或微動開關)和/或某種形式的順序控制(例如,計算機程序)來指導和監控它們的活動。 近幾十年來,一個 可編程邏輯控制器 (PLC) 越來越多地被用作生產系統中的控制單元。 小型計算機現在是工業化世界中用於控制生產設備的最常用手段,而其他控製手段,如機電單元,則越來越不常見。 在瑞典製造業中,數控 (NC) 機器的使用在 11 年代以每年 12% 到 1980% 的速度增長(Hörte 和 Lindberg 1989)。 在現代工業生產中,被“機器運動部件”傷害越來越等同於被“計算機控制的機器運動”傷害。
自動化裝置出現在越來越多的工業領域,它們的功能也越來越多。 商店管理、材料處理、加工、組裝和包裝都實現了自動化。 系列生產已經變得類似於過程生產。 如果工件的進料、加工和頂出實現機械化,操作人員在正常、不受干擾的生產過程中不再需要處於危險區域。 自動化製造的研究表明,事故主要發生在處理影響生產的干擾時。 然而,在執行其他任務(例如清潔、調整、重置、控制和維修)時,人也會妨礙機器運動。
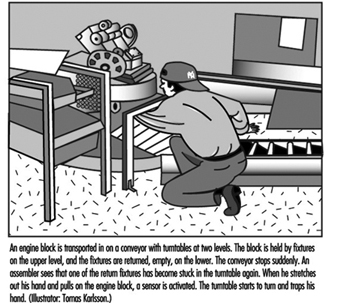
當生產實現自動化並且流程不再受人的直接控制時,意外機器運動的風險就會增加。 大多數使用互連機器組或生產線的操作員都經歷過這種意外的機器運動。 許多 自動化事故 正是由於這種運動而發生的。 自動化事故是指自動化設備控制(或應當控制)引起傷害的能量的事故。 這意味著傷害人的力量來自機器本身(例如,機器運動的能量)。 在對瑞典 177 起自動化事故的研究中,發現在 84% 的案例中,傷害是由機器部件的“意外啟動”造成的(Backström 和 Harms-Ringdahl 1984)。 由計算機控制的機器運動造成傷害的典型示例如圖 2 所示。
圖 2. 由計算機控制的機器運動造成傷害的典型示例
上面提到的一項研究(Backström 和 Döös 1995)表明,與其他類型的機器運動造成的傷害相比,自動控制的機器運動與更長的病假時間有因果關係,其中一個工作場所的中值高四倍. 自動化事故的傷害模式與其他機器事故(主要涉及手和手指)相似,但前一種傷害有更嚴重的趨勢(截肢、壓傷和骨折)。
計算機控制與手動控制一樣,從可靠性的角度來看也存在弱點。 無法保證計算機程序將無錯誤地運行。 如果沒有適當保護,信號電平較低的電子設備可能對乾擾敏感,並且無法始終預測由此產生的故障的後果。 此外,編程更改通常沒有記錄在案。 例如,用於彌補此弱點的一種方法是通過運行“雙”系統,其中有兩個獨立的功能組件鍊和一種監視方法,以便兩個鏈顯示相同的值。 如果系統顯示不同的值,則表示其中一個出現故障。 但是有可能兩個組件鏈都可能出現相同的故障,並且它們都可能因相同的干擾而出現故障,從而給出誤報讀數(正如兩個系統都同意的那樣)。 然而,在調查的少數案例中,有可能將事故追溯到計算機故障(見下文),儘管事實上通常由一台計算機控制一個裝置的所有功能(甚至停止作為安全裝置激活的結果的機器)。 作為替代方案,可以考慮提供一個經過試驗和測試的系統,該系統具有用於安全功能的機電組件。
技術問題
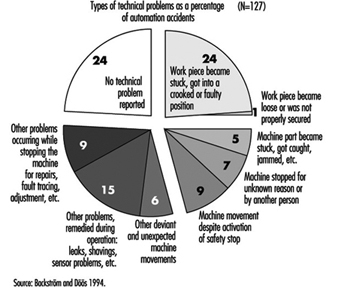
總的來說,可以說一次事故的原因是多方面的,包括技術原因、個人原因、環境原因和組織原因。 出於預防目的,最好不要將事故視為孤立事件,而應視為 序列 事件或過程 (Backström 1996)。 在自動化事故的情況下,已經表明技術問題經常是此類序列的一部分,並且發生在過程的早期階段之一或接近事故的傷害事件。 對自動化事故中涉及的技術問題進行檢查的研究表明,75% 到 85% 的事故都是由這些問題引起的。 同時,在任何具體情況下,通常還有其他原因,例如組織性質的原因。 只有十分之一的案例被發現導致傷害的直接能量來源可歸因於技術故障——例如,儘管機器處於停止位置但機器仍在運動。 其他研究也報導了類似的數字。 通常,技術問題會導致設備出現故障,因此操作員不得不轉換任務(例如,重新定位處於彎曲位置的零件)。 事故隨後發生在執行任務期間,由技術故障引起。 四分之一的自動化事故發生在物料流出現紊亂之前,例如零件卡住或進入彎曲或其他故障位置(見圖 3)。
圖3. 自動化事故涉及的技術問題類型(事故數=127)
在對 127 起涉及自動化的事故的研究中,對其中 28 起事故(如圖 4 中的描述)進行了進一步調查,以確定作為起因的技術問題的類型(Backström 和 Döös,出版中)。 事故調查中指出的問題最常由卡住、有缺陷或磨損的部件引起。 在兩種情況下,問題是由計算機程序錯誤引起的,另一種是由電磁干擾引起的。 在超過一半的案例中(17 個中的 28 個),故障已經存在一段時間但沒有得到糾正。 在提及技術故障或偏差的 5 個案例中,只有 28 個存在缺陷 任何監管機構都不批准 之前就表現出來了。 一些故障已經被修復只是後來重新出現。 某些缺陷從安裝之時就已經存在,而其他缺陷則是由於磨損和環境影響造成的。
根據大多數研究,在糾正生產乾擾過程中發生的自動化事故比例佔所有案例的三分之一到三分之二。 換句話說,人們普遍認為處理生產乾擾是一項危險的職業任務。 此類事故發生程度的差異有多種解釋,其中包括與生產類型和職業任務分類方式有關的解釋。 在一些干擾研究中,只考慮了正常生產過程中的問題和機器停機; 在其他情況下,處理的問題範圍更廣——例如,那些與工作安排有關的問題。
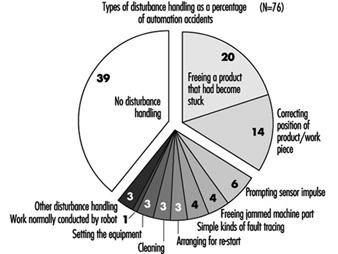
預防自動化事故的一項非常重要的措施是準備消除生產乾擾原因的程序,以免它們再次發生。 在事故發生時對生產乾擾的專門研究中(Döös 和 Backström 1994),發現干擾引起的最常見任務是釋放或糾正被卡住或錯誤的工件的位置放置。 此類問題引發了兩個相當相似的事件序列之一:(1) 零件被釋放並進入正確位置,機器收到自動啟動信號,人因機器運動開始受傷,(2 ) 在人員因意外、更快或比操作員預期更大的力的機器運動受傷之前,沒有時間釋放或重新定位零件。 其他干擾處理包括觸發傳感器脈衝、釋放卡住的機器部件、執行簡單類型的故障跟踪以及安排重啟(見圖 4)。
圖 4. 事故發生時的干擾處理類型(事故數 =76)
工人安全
容易在自動化事故中受傷的人員類別取決於工作的組織方式,即執行危險任務的職業群體。 在實踐中,這是工作場所的哪個人被指派來例行處理問題和乾擾的問題。 在現代瑞典工業中,通常需要操作機器的人員進行積極干預。 這就是為什麼在前面提到的瑞典汽車製造工作場所研究(Backström 和 Döös,接受發表)中,發現 82% 因自動化機器受傷的人是生產工人或操作員。 操作員的相對事故頻率(每年每 15 名操作員發生 1,000 起自動化事故)也高於維修工人(每 6 名發生 1,000 起)。 研究結果表明維修工人受到的影響更大,這至少可以部分解釋為某些公司不允許操作員進入機加工區域。 在具有不同類型任務分配的組織中,其他類別的人員(例如設置人員)可能會被賦予解決出現的任何生產問題的任務。
為了提高人身安全水平,在這方面採取的最常見的糾正措施是通過使用某種安全裝置(例如機器防護裝置)來保護人員免受危險機器運動的傷害。 這裡的主要原則是“被動”安全——即提供不需要工人採取行動的保護。 然而,如果不非常了解相關機器的實際工作要求,就不可能判斷保護裝置的有效性,這種知識通常只有機器操作員自己才具備。
有許多因素甚至可能使看似良好的機器保護失效。 為了執行他們的工作,操作員可能需要脫離或繞過安全裝置。 在一項研究中(Döös 和 Backström 1993),發現在所涵蓋的 12 起自動化事故中,有 75 起發生了這種脫離或規避。 這通常是操作員雄心勃勃的問題,並且不再願意接受生產問題或根據指令糾正干擾所涉及的生產過程的延遲。 避免此問題的一種方法是使保護裝置不易察覺,使其不影響生產節奏、產品質量或任務績效。 但這並不總是可能的。 在生產反复受到干擾的地方,即使是輕微的不便也會促使人們不使用安全裝置。 同樣,應該制定例行程序來消除生產乾擾的原因,以免重複發生。 缺乏確認安全裝置是否真正按照規范運行的方法是另一個重要的風險因素。 錯誤的連接、留在系統中的啟動信號隨後會導致意外啟動、氣壓升高以及鬆動的傳感器都可能導致保護設備失效。
總結
正如已經表明的那樣,問題的技術解決方案可能會引起新的問題。 儘管傷害是由機器運動造成的,本質上是技術性的,但這並不意味著它們的根除潛力就在於純粹的技術因素。 技術系統將繼續出現故障,人們將無法處理這些故障引起的情況。 風險將繼續存在,只能通過多種手段加以控制。 立法和控制、個別公司的組織措施(以培訓、安全巡視、風險分析和乾擾和險情報告的形式)以及對穩定、持續改進的強調都需要作為純技術開發的補充。