Општи развој микроелектронике и технологије сензора даје разлог за наду да се побољшање безбедности на раду може постићи доступношћу поузданих, издржљивих, јефтиних и јефтиних детектора присуства и приступа. Овај чланак ће описати сензорску технологију, различите процедуре детекције, услове и ограничења која се примењују на коришћење сензорских система, као и неке завршене студије и рад на стандардизацији у Немачкој.
Критеријуми детектора присуства
Развој и практично тестирање детектора присуства један је од највећих будућих изазова за техничке напоре у побољшању заштите на раду и за заштиту особља уопште. Детектори присуства су сензори који поуздано и са сигурношћу сигнализирају блиско присуство или приближавање особе. Поред тога, ово упозорење мора да се јави брзо како би се акција избегавања, кочење или гашење непокретне машине десили пре него што дође до предвиђеног контакта. Било да су људи велики или мали, без обзира на њихово држање или како су обучени, не би требало да утиче на поузданост сензора. Поред тога, сензор мора имати сигурност у функционисању и бити чврст и јефтин, тако да се може користити у најзахтевнијим условима, као што су на градилиштима и за мобилне апликације, уз минимално одржавање. Сензори морају бити као ваздушни јастук јер не захтевају одржавање и увек спремни. С обзиром на неспремност неких корисника да одржавају оно што могу сматрати небитном опремом, сензори могу остати несервисани годинама. Још једна карактеристика детектора присуства, за коју је много вероватније да ће бити тражена, јесте да они такође откривају препреке осим људских бића и упозоравају оператера на време да предузме одбрамбену акцију, чиме се смањују трошкови поправке и материјална штета. Ово је разлог за инсталирање детектора присуства који не треба потценити.
Детецтор Апплицатионс
Безбројне фаталне незгоде и тешке повреде које изгледају као неизбежни појединачни чинови судбине могу се избећи или минимизирати под условом да детектори присуства постану више прихваћени као превентивна мера у области заштите на раду. Новине пречесто извештавају о овим несрећама: овде је човека ударио утоваривач који се кретао уназад, тамо руковалац није видео некога кога је прегазио предњи точак моторне лопате. Камиони који се крећу уназад по улицама, просторијама предузећа и градилиштима узрок су многих несрећа људи. Данашње потпуно рационализоване компаније више не обезбеђују сувозаче или друге особе које би биле водичи за возача који прати камион. Ови примери незгода у покрету могу се лако проширити на другу мобилну опрему, као што су виљушкари. Међутим, хитно је потребна употреба сензора како би се спречиле незгоде које укључују полумобилну и чисто стационарну опрему. Пример су задње области великих машина за утовар, које је безбедносно особље идентификовало као потенцијално опасне области које би се могле побољшати коришћењем јефтиних сензора. Многе варијације детектора присуства могу се иновативно прилагодити другим возилима и великој мобилној опреми како би се заштитиле од врста несрећа о којима се говори у овом чланку, а које генерално изазивају велику штету и озбиљне, ако не и фаталне повреде.
Тенденција да иновативна решења постану све распрострањенија изгледа обећава да ће детектори присуства постати стандардна безбедносна технологија у другим апликацијама; међутим, нигде то није случај. Пробој, мотивисан несрећама и великом материјалном штетом, очекује се у праћењу иза доставних комбија и тешких камиона и за најиновативније области „нових технологија“ — мобилних роботских машина будућности.
Варијације у областима примене детектора присуства и варијабилност задатака – на пример, толерисање објеката (чак и покретних објеката, под одређеним условима) који припадају пољу детекције и који не би требало да активирају сигнал – захтевају сензоре у којима „ интелигентна” технологија процене подржава механизме функције сензора. Ова технологија, која је предмет будућег развоја, може се разрадити из метода које се ослањају на област вештачке интелигенције (Сцхреибер и Кухн 1995). До данас, ограничена универзалност је озбиљно ограничила тренутну употребу сензора. Постоје светлосне завесе; светлосне траке; контактне простирке; пасивни инфрацрвени сензори; ултразвучни и радарски детектори покрета који користе Доплеров ефекат; сензори који врше мерења протеклог времена ултразвука, радара и светлосних импулса; и ласерски скенери. Нормалне телевизијске камере повезане са мониторима нису укључене у ову листу јер нису детектори присуства. Међутим, укључене су оне камере које се аутоматски активирају када осете присуство особе.
Сензорна технологија
Данас су главна питања сензора (1) оптимизација употребе физичких ефеката (инфрацрвено, светло, ултразвук, радар, итд.) и (2) самонадгледање. Ласерски скенери се интензивно развијају за употребу као навигациони инструменти за мобилне роботе. За ово морају бити решена два задатка, делимично различита у принципу: навигација робота и заштита присутних особа (и материјала или опреме) да их не ударе, прегазе или зграбе (Фреунд, Диеркс и Россман 1993). ). Будући мобилни роботи не могу задржати исту безбедносну филозофију „просторног одвајања робота и особе“ која се стриктно примењује на данашње стационарне индустријске роботе. То значи да се високо цени поуздано функционисање детектора присуства који ће се користити.
Употреба „нове технологије“ често је повезана са проблемима прихватања, и може се претпоставити да је општа употреба мобилних робота који могу да се крећу и хватају, међу људима у биљкама, у јавним саобраћајним површинама, или чак у кућама или рекреативним зонама. , биће прихваћени само ако су опремљени веома развијеним, софистицираним и поузданим детекторима присуства. Спектакуларне незгоде се морају избећи по сваку цену како би се избегло погоршање могућег проблема прихватања. Тренутни ниво издатака за развој ове врсте сензора за заштиту на раду није ни близу узимања овог разматрања. Да бисте уштедели много трошкова, детекторе присуства треба развити и тестирати истовремено са мобилним роботима и навигационим системима, а не накнадно.
У погледу моторних возила, питања безбедности добијају све већи значај. Иновативна безбедност путника у аутомобилима укључује сигурносне појасеве у три тачке, дечја седишта, ваздушне јастуке и систем против блокирања кочница верификован серијским тестовима судара. Ове мере безбедности представљају релативно све већи део трошкова производње. Системи бочних ваздушних јастука и радарских сензора за мерење удаљености до аутомобила испред су еволутивни развој у заштити путника.
Спољна безбедност моторних возила – односно заштита трећих лица – посвећује се повећана пажња. У последње време потребна је бочна заштита, пре свега за камионе, како би се спречила опасност да мотоциклисти, бициклисти и пешаци падну под задње точкове. Следећи логичан корак би био праћење подручја иза великих возила са детекторима присуства и инсталирање опреме за упозорење позади. Ово би имало позитиван споредни ефекат обезбеђивања финансијских средстава потребних за развој, тестирање и стављање на располагање јефтиних сензора за безбедност на раду са максималним перформансама, самоконтролисањем, без одржавања и поуздано функционисањем. Пробни процес који би пратио широку имплементацију сензора или сензорских система би значајно олакшао иновације у другим областима, као што су моторне лопате, тешки утоваривачи и друге велике мобилне машине које раде половину времена током свог рада. Еволуцијски процес од стационарних робота до мобилних робота је додатни пут развоја за детекторе присуства. На пример, побољшања би се могла направити на сензорима који се тренутно користе на покретним роботима за кретање материјала или „фабричким подним тракторима без возача“, који прате фиксне путање и стога имају релативно ниске безбедносне захтеве. Употреба детектора присуства је следећи логичан корак у унапређењу безбедности у области транспорта материјала и путника.
Процедуре детекције
За процену и решавање горе наведених задатака могу се користити различити физички принципи, доступни у вези са електронским методама мерења и самоконтроле и, у извесној мери, рачунарским процедурама високих перформанси. Наизглед без напора и сигуран рад аутоматизованих машина (робота) тако уобичајених у научно-фантастичним филмовима, вероватно ће бити постигнут у стварном свету коришћењем техника снимања и алгоритама за препознавање образаца високих перформанси у комбинацији са методама мерења удаљености аналогним онима запослени код ласерских скенера. Мора се препознати парадоксална ситуација да је све што људима изгледа једноставно тешко за аутомате. На пример, тежак задатак као што је одлично играње шаха (које захтева активност предњег мозга) може се лакше симулирати и извести аутоматизованим машинама него једноставан задатак као што је ходање усправно или извођење координације шака-око и других покрета (посредовано уз помоћ средњи и задњи мозак). Неки од ових принципа, метода и процедура применљивих на сензорске апликације су описани у наставку. Поред ових, постоји велики број специјалних процедура за веома специјалне задатке који делују делом уз комбинацију различитих врста физичких ефеката.
Лагане баријере завесе и решетке. Међу првим детекторима присуства биле су светлосне баријере завесе и решетке. Имају равну геометрију праћења; односно онај ко је прошао баријеру више неће бити откривен. Рука оператера, или присуство алата или делова који се држе у руци оператера, на пример, могу се брзо и поуздано открити помоћу ових уређаја. Они нуде важан допринос безбедности на раду за машине (као што су пресе и машине за штанцање) које захтевају да се материјал ставља ручно. Поузданост мора бити статистички изузетно висока, јер када се рука дохвати само два до три пута у минути, за само неколико година се уради око милион операција. Међусобно самонадгледање компоненти пошиљаоца и пријемника је развијено до тако високог техничког нивоа да представља стандард за све остале процедуре детекције присуства.
Контактне простирке (преклопне простирке). Постоје и пасивни и активни (пумпа) типови електричних и пнеуматских контактних простирки и подова, који су у почетку били коришћени у великом броју у сервисним функцијама (отварачи врата), док их нису заменили детектори покрета. Даљи развој се развија коришћењем детектора присуства у свим врстама опасних зона. На пример, развој аутоматизоване производње са променом функције радника — од управљања машином до стриктно надгледања њене функције — произвео је одговарајућу потражњу за одговарајућим детекторима. Стандардизација ове употребе је добро узнапредовала (ДИН 1995а), а посебна ограничења (распоред, величина, максимално дозвољене „мртве” зоне) су захтевале развој стручности за уградњу у овој области употребе.
Занимљиве могуће употребе контактних простирки се јављају у вези са компјутерски контролисаним вишеструким роботским системима. Оператер мења један или два елемента како би детектор присуства покупио његов или њен тачан положај и обавестио компјутер, који управља системима контроле робота са уграђеним системом за избегавање судара. У једном тесту који је унапредио немачки савезни институт за безбедност (БАУ), подни под са контактним простиркама, који се састоји од малих електричних струњача, изграђен је испод радног простора руке робота за ову сврху (Фреунд, Диеркс и Россман 1993). Овај детектор присуства имао је облик шаховске табле. Одговарајуће активирано поље простирке је саопштило рачунару позицију оператера (слика 1) и када се оператер приближио превише близу роботу, он се удаљио. Без детектора присуства роботски систем не би могао да утврди позицију оператера, а оператер тада не би могао бити заштићен.
Слика 1. Особа (десно) и два робота у рачунарским омотачима

Рефлектори (сензори покрета и детектори присуства). Колико год да су сензори о којима се до сада расправљало вредни, они нису детектори присуства у ширем смислу. Њихова погодност — пре свега из разлога безбедности на раду — за велика возила и велику мобилну опрему претпоставља две важне карактеристике: (1) могућност праћења подручја са једне позиције и (2) функционисање без грешака без потребе за додатним мерама на део—на пример, коришћење рефлекторских уређаја. Откривање присуства особе која улази у посматрано подручје и остаје заустављена док та особа не оде такође подразумева потребу за откривањем особе која стоји апсолутно мирно. Ово разликује такозване сензоре покрета од детектора присуства, барем у вези са мобилном опремом; сензори покрета се скоро увек активирају када се возило покрене.
Сензори покрета. Два основна типа сензора покрета су: (1) „пасивни инфрацрвени сензори“ (ПИРС), који реагују на најмању промену инфрацрвеног снопа у надгледаном подручју (најмањи сноп који се може детектовати је отприлике 10-9 В са опсегом таласних дужина од приближно 7 до 20 μм); и (2) ултразвучни и микроталасни сензори који користе Доплеров принцип, који одређује карактеристике кретања објекта према променама фреквенције. На пример, Доплеров ефекат повећава фреквенцију трубе локомотиве за посматрача када се приближава, а смањује фреквенцију када се локомотива удаљава. Доплеров ефекат омогућава изградњу релативно једноставних сензора приступа, пошто пријемник треба само да прати фреквенцију сигнала суседних фреквенцијских опсега за појаву Доплерове фреквенције.
Средином 1970-их употреба детектора покрета постала је преовлађујућа у апликацијама услужних функција као што су отварачи врата, заштита од крађе и заштита објеката. За стационарну употребу, откривање особе која се приближава опасном месту било је довољно да се благовремено упозори или искључи машина. Ово је била основа за проучавање погодности детектора покрета за њихову употребу у заштити на раду, посебно помоћу ПИРС (Местер ет ал. 1980). Пошто обучена особа генерално има вишу температуру од околине (глава 34°Ц, руке 31°Ц), откривање особе која се приближава је нешто лакше него откривање неживих предмета. У ограниченој мери, делови машине могу да се крећу у надгледаном подручју без активирања детектора.
Пасивни метод (без предајника) има предности и мане. Предност је у томе што ПИРС не ствара проблеме са буком и електричним смогом. За сигурност од крађе и заштиту предмета, посебно је важно да детектор није лако пронаћи. Сензор који је чисто пријемник, међутим, тешко може да прати сопствену ефикасност, што је од суштинског значаја за безбедност на раду. Један од метода за превазилажење овог недостатка је био тестирање малих модулисаних (5 до 20 Хз) инфрацрвених емитера који су инсталирани у надгледаном подручју и који нису активирали сензор, али чији су снопови регистровани фиксним електронским појачањем подешеним на фреквенцију модулације. Ова модификација га је претворила из "пасивног" сензора у "активни" сензор. На овај начин је такође било могуће проверити геометријску тачност посматраног подручја. Огледала могу имати слепе тачке, а смер пасивног сензора може бити одбачен грубом активношћу у биљци. На слици 2 приказан је распоред теста са ПИРС-ом са надгледаном геометријом у облику плашта пирамиде. Због великог домета, пасивни инфрацрвени сензори се инсталирају, на пример, у пролазе регалних складишта.
Слика 2. Пасивни инфрацрвени сензор као детектор приступа у опасној зони

Све у свему, тестови су показали да детектори покрета нису прикладни за безбедност на раду. Ноћни музејски под се не може поредити са опасним зонама на радном месту.
Детектори ултразвука, радара и светлосних импулса. Сензори који користе принцип пулс/ехо – то јест, мерење протеклог времена ултразвука, радара или светлосних импулса – имају велики потенцијал као детектори присуства. Код ласерских скенера, светлосни импулси могу брзо да се померају (обично на ротациони начин), на пример, хоризонтално, а уз помоћ рачунара може се добити профил удаљености објеката у равни који рефлектују светлост. Ако се, на пример, не тражи само једна линија, већ целокупно оно што се налази испред мобилног робота у области до висине од 2 метра, онда се велике количине података морају обрадити да би се приказала околна област. Будући „идеалан” детектор присуства састојаће се од комбинације следећа два процеса:
- Биће примењен процес препознавања образаца, који се састоји од камере и рачунара. Ово последње може бити и „неуронска мрежа“.
- Даље је потребан процес ласерског скенирања за мерење удаљености; ово узима курс у тродимензионалном простору преко више појединачних тачака одабраних процесом препознавања образаца, успостављених да би се добила удаљеност и кретање по брзини и правцу.
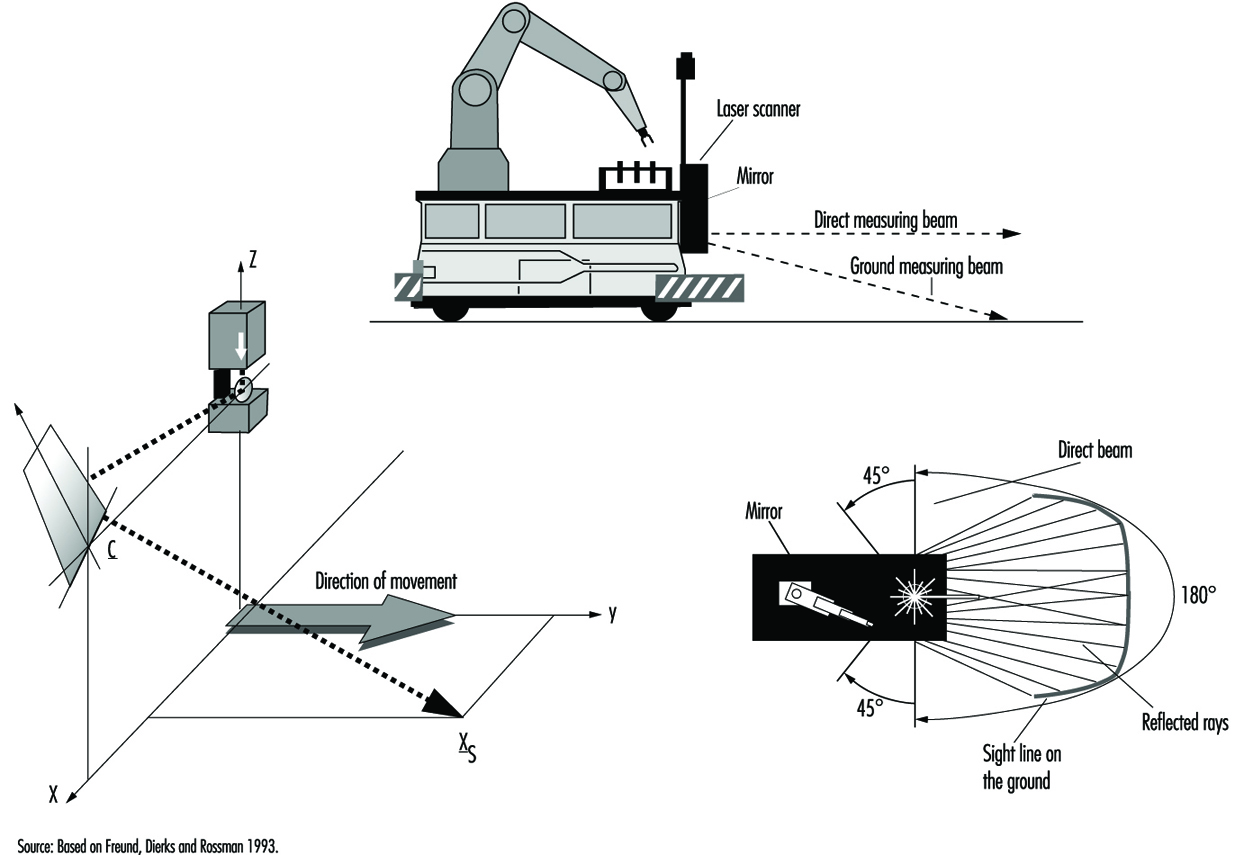
Слика 3 приказује, из претходно цитираног БАУ пројекта (Фреунд, Диеркс и Россман 1993), коришћење ласерског скенера на мобилном роботу који такође преузима навигационе задатке (преко снопа који открива правац) и заштиту од судара за објекте у непосредној близини. близина (преко земаљског мерног зрака за детекцију присуства). С обзиром на ове карактеристике, мобилни робот има могућност активна аутоматизована бесплатна вожња (тј. способност заобилажења препрека). Технички, ово се постиже коришћењем угла ротације скенера од 45° према задњој страни са обе стране (на леву и десну страну робота) поред угла од 180° према напред. Ове зраке су повезане са посебним огледалом које делује као светлосна завеса на поду испред мобилног робота (обезбеђујући линију вида са земље). Ако одатле дође ласерска рефлексија, робот се зауставља. Док су ласерски и светлосни скенери сертификовани за употребу у заштити на раду на тржишту, ови детектори присуства имају велики потенцијал за даљи развој.
Слика 3. Мобилни робот са ласерским скенером за навигацију и детекцију присуства
Ултразвучни и радарски сензори, који користе протекло време од сигнала до одговора за одређивање удаљености, мање су захтевни из техничке перспективе и стога се могу производити јефтиније. Сензорска област је у облику штапа и има једну или више мањих бочних палица, које су симетрично распоређене. Брзина ширења сигнала (звук: 330 м/с; електромагнетни талас: 300,000 км/с) одређује потребну брзину електронике која се користи.
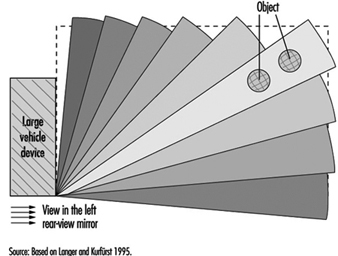
Уређаји за упозорење позади. На сајму у Хановеру 1985. године, БАУ је показао резултате почетног пројекта о коришћењу ултразвучних сензора за обезбеђење простора иза великих возила (Лангер и Курфурст 1985). Модел сензорске главе у пуној величини од Полароид™ сензора постављен је на задњи зид камиона за снабдевање. Слика 4 шематски приказује његово функционисање. Велики пречник овог сензора производи мерене области под малим углом (приближно 18°), дугог домета у облику штапа, распоређене једна поред друге и подешене на различите максималне опсеге сигнала. У пракси омогућава постављање било које жељене геометрије која се прати, коју сензори скенирају отприлике четири пута у секунди за присуство или улазак особа. Други демонстрирани системи упозорења за позадину имали су неколико паралелних појединачних сензора.
Слика 4. Распоред мерне главе и надгледана површина на задњој страни камиона
Ова живописна демонстрација имала је велики успех на изложби. Показало се да се осигурање задњег дела великих возила и опреме проучава на многим местима—на пример, од стране специјализованих комитета индустријских трговинских удружења (Беруфсгеноссенсцхафтен), општински осигуравачи од незгода (који су одговорни за комунална возила), државни службеници за надзор индустрије и произвођачи сензора, који су више размишљали о аутомобилима као сервисним возилима (у смислу фокусирања на паркинг системе за заштиту од оштећење каросерије аутомобила). Ад хоц комисија састављена из група за промоцију уређаја за упозоравање на позадину формирана је спонтано и као први задатак је узела припрему листе захтева из перспективе заштите на раду. Прошло је десет година за које време је много разрађено у надзору позади—вероватно најважнији задатак детектора присуства; али велики продор још увек недостаје.
Многи пројекти су спроведени са ултразвучним сензорима—на пример, на дизалицама за сортирање обловине, хидрауличним лопатама, специјалним комуналним возилима и другим комуналним возилима, као и на виљушкарима и утоваривачима (Сцхреибер 1990). Уређаји за упозорење позади су посебно важни за велике машине које праве резервне копије већи део времена. Ултразвучни детектори присуства се користе, на пример, за заштиту специјализованих возила без возача, као што су роботске машине за руковање материјалом. У поређењу са гуменим браницима, ови сензори имају већу област детекције која омогућава кочење пре него што дође до контакта између машине и предмета. Одговарајући сензори за аутомобиле су одговарајући развој и подразумевају знатно мање строге захтеве.
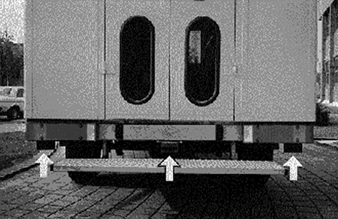
У међувремену, Комитет за техничке стандарде транспортног система ДИН-а разрадио је Стандард 75031, „Уређаји за откривање препрека током вожње уназад“ (ДИН 1995б). Захтеви и тестови су постављени за два опсега: 1.8 м за камионе за снабдевање и 3.0 м — додатна зона упозорења — за веће камионе. Надгледана област је подешена кроз препознавање цилиндричних тест тела. Опсег од 3 метра је такође отприлике граница онога што је тренутно технички могуће, јер ултразвучни сензори морају имати затворене металне мембране, с обзиром на њихове тешке услове рада. Постављају се захтеви за самонадзор сензорског система, јер се потребна праћена геометрија може постићи само са системом од три или више сензора. Слика 5 приказује уређај за упозорење у задњем делу који се састоји од три ултразвучна сензора (Мицросониц ГмбХ 1996). Исто важи и за уређај за обавештавање у кабини возача и врсту сигнала упозорења. Садржај ДИН стандарда 75031 је такође изложен у међународном техничком ИСО извештају ТР 12155, „Комерцијална возила—Уређај за откривање препрека током вожње уназад“ (ИСО 1994). Разни произвођачи сензора развили су прототипове у складу са овим стандардом.
Слика 5. Камион средње величине опремљен уређајем за упозорење позади (Микрозвучна фотографија).
Zakljucak
Од раних 1970-их, неколико институција и произвођача сензора радило је на развоју и успостављању „детектора присуства“. У специјалној примени „уређаја за упозорење позади” постоје ДИН стандард 75031 и ИСО извештај ТР 12155. Тренутно Деутсцхе Пост АГ спроводи велико тестирање. Неколико произвођача сензора је опремило по пет камиона средње величине таквим уређајима. Позитиван исход овог теста је у великој мери у интересу заштите на раду. Као што је наглашено на почетку, детектори присуства у потребном броју представљају велики изазов за сигурносну технологију у многим поменутим областима примене. Због тога морају бити изводљиве по ниској цени ако се штете на опреми, машинама и материјалима и, пре свега, повреде људи, често веома озбиљне, врате у прошлост.